robotking69
USA
Asked
— Edited
Sabertooth And Ezb V4
(Newbie here)..... lol
I have been fighting for the past two days now to get my robot to move with no luck. I have a sabertooth 2x25 that works fine if I hook it to a RC receiver but when I hook it to the ezb it will not control the motors. I have used the sabertooth plug in and it has no speed control. I have tried to use the servo control it filed under my newbieness to the ezb. Can someone make a plugin that will work like the sabertooth plugin but give the user speed control. but for now can someone take me step by step on how to set this up so I can use my ezb only and not have to continue to use a RC receiver. Thanks for any and all help... confused confused

I'm no expert with these but I use them. It sounds like you have the Sabertooth for RC controllers - I'm not sure if that one will work with the EZB. Check that. You don't need a special plugin just use the Custom Movement Panel control in your project. Also, post how you have your Sabertooth connected now and we can help you from there.
Every control has a ? (Question mark) next to the X (close) button. Press the ? on the saber tooth control to read the manual. Here is a direct link: https://synthiam.com/Tutorials/Help.aspx?id=173
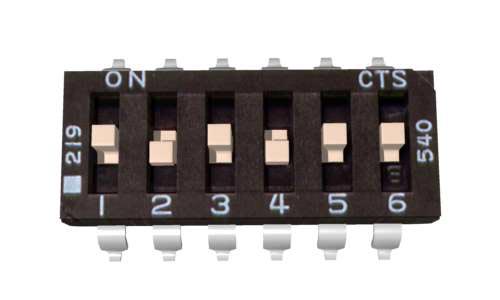
I have the sabertooth set to simplified serial,9600 baud per the dip config that was on the sabertooth 2x25 dip switch wizard . It is plugged in to port D0. I used the dip switch config from dimension engineering > https://www.dimensionengineering.com/datasheets/SabertoothDIPWizard/start.htm . I did the following lead acid for battery type / TTl level for input / simplified serial / jest one controller.This is what i got
(Update) i jest tried running this setup jest so i can say i did and the motors only go one way and when i click the other button lets say left it has a hard stop and knocks the camera off the side. my motors are two wheel chair motors if that helps with knowing what size my bot is.
Robot king - I'll modify the control to have speed slider. I would recommend using the joystick control rather than RC. It will work the same way.
Thank you do I have the other settings right as far as dip switches I'm not shure how the dip switches should be configured in jest going off of what info I can find??
Every control has a ? (Question mark) next to the X (close) button. Press the ? on the saber tooth control to read the manual. Here is a direct link with setup information and many tutorials: https://synthiam.com/Tutorials/Help.aspx?id=173
DJ Sures ,I have hit the ? mark on the sabertooth and i was asking about the dip switch it asked for the input or the output of the ezb rather is the output of the ezb one of the following
The EZ-B Sabertooth motion panel users simple serial at 38,400. Here is one of may good threads on the subject: https://synthiam.com/Community/Questions/8899&page=1
This is the kind of question that the EZ-R forum doesn't support searches for well, but the site is indexed by google. You can find every mention of Sabertooth and dip switches by using this in a google search.
Alan