
Asked
— Edited
Radar And Rgb Dont Work
i read the tutorial tree times,try all kinds of stuff.bolt rgb and ping sensor dont work.i use an original roli ARC.the ARC disconnect when trying to use one of the rgb,got 2 .the ping sensor doesn see anything.
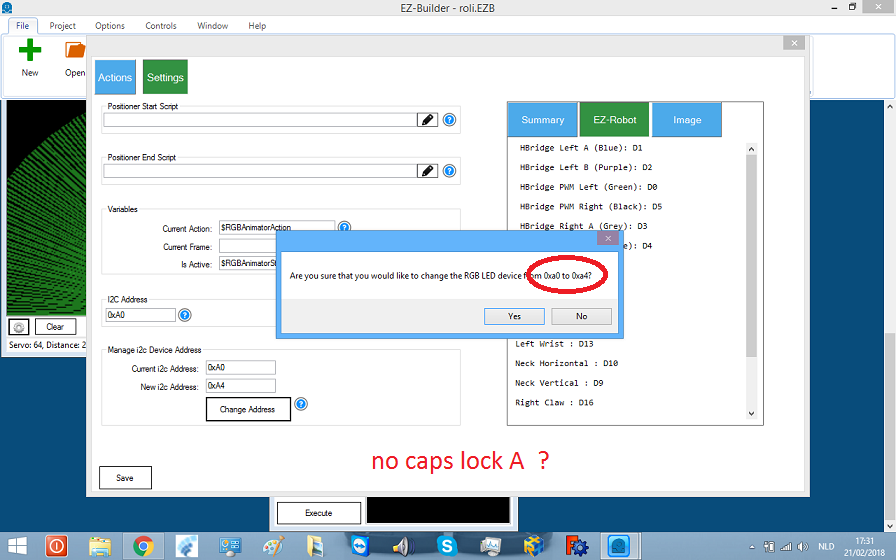
in this pic i cant set a capitel A ?
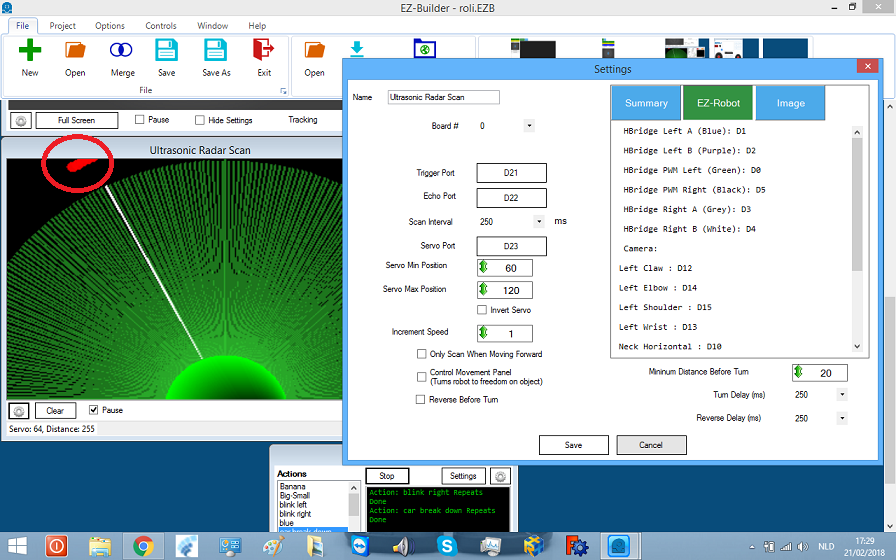
in this pic radar no tracking line.

Hi Nomad,
Do you have an Ultrasonic version 2 sensor with 3 wires? If that is the case the trigger and echo ports will need to be configured to the same port (ex: both configured to D21)
For the I2C address, I don't believe it's case sensitive (lowercase 'a' or uppercase 'A' shouldn't matter) but I will look into it.
hi jeremie
the back rgb works on 0xa2.the front i changed into 0xa4 i see blue color, but when trying to use the rgb ,the ezbv4 chut down,disconnect.
the ping sensor is with 4 wires black/red/green/white,all set like in tutorial. but when using the radar i see ubove red line not in the green part, so i gess it dont detect objects.
thanks
hi RR
yes there is standard a 5 v regulator.i only use ez robots parts.
thanks
Did you check to see if your ping actually works without anything else hooked up or in your project? Meaning just the ping and a distance sensor control?
if you see my last foto ubove you see a red line.doesn this mean the ping woorks?
@nomad
If the ping is working, you will see the values move (you're picture says 255). If you move your hand closer to the ping, these numbers will go down.
I did notice in your pictures of the radar control that the "Pause" box has a tick in it. You have to click on the tick to remove it for your ping sensor to pick up readings...
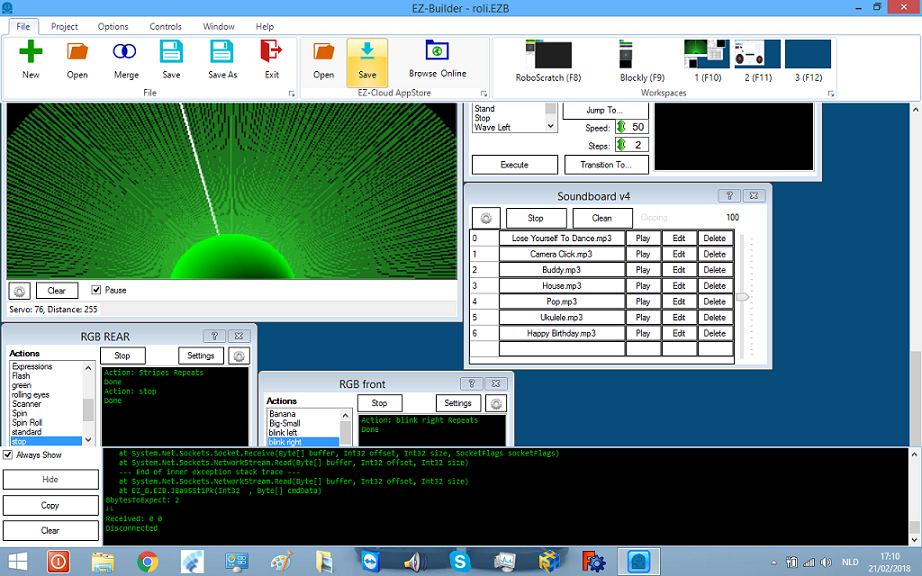
If anyone noticed - he's not actually connected to the EZ-B. Look at the debug window, it's disconnected. Most likely because the EZ-B locked up due to an invalid RGB i2c configuration.
Nomad, you're in panic mode and not paying attention Tackle one thing at a time... first, I believe that you're attempting to configure the RGB Eyes to have a different i2c port?
Tackle one thing at a time... first, I believe that you're attempting to configure the RGB Eyes to have a different i2c port?
Well, firstly... you can only have 1 i2c device per address. So you cannot connected 2 i2c devices with the same address.