
MovieMaker
USA
Asked
— Edited
Question On Wirings Of The Modified Omnibot2000.
Ok, here is what I finally came up with. Please give me feedback:
I start off with 12vdc which goes to the switch and base. From there it goes to a BUCK 15A Regulator which steps it down to 7.2V and it goes to EVERYTHING else. Two EZBs get their power from this. The two arms get their power. So, I will be operating two EZBS and 17 Heavy Duty servos from this 15A regulator. I have 43 more 2A regulators if I need them. But, I hate to wire all of those. I am running out of room to put all of this.
Oh, by the way, I get the power from three 9AH 12vdc PowerSonic Gel Cels. Oh,and MONEY has become an issue.
Suggestions Welcome.
Thanks,
;)

Are they EZ-B V3s or EZ-B V4s?
I ask because if they are V3s there is no need to regulate the supply therefore allowing more current for the servos.
15A to power 17 heavy duty servos which can pull as much as 2A on full load (depending on the servo used) may be a little undersized. Personally I allow 5A for every 2 servos, this way I know it wont be too demanding for the regulator (as previously stated elsewhere, 2 x Tower Pro MG995s and 1 x LCD display were causing my EZ-B to brown out therefore were pulling over 5A combined).
Personally speaking I would supply the EZ-Bs with 12V. Regulate the VCC from the EZ-B to 7.2v (if V4) with the individual 2A regulators.
I have two EZB ver. 3. But, one is broken. I have a ver. 4 on order. So, she will wind up with one of each.
Well the V3 will only provide 5V to servos regardless of input voltage so those 20 ports will be limited, unless you tap off of the regulator before the EZ-B. Either way, powering this EZ-B from a regulator would be pointless, you may as well power it direct from the batteries.
You could also power the V4 from the batteries. Connect the regulator to the batteries and take all VCC and Ground from the regulator rather than the EZ-B... in other words only the signal from the EZ-B is used.
Although I am concerned that the 15A regulator is not going to be man enough to power everything.
Now, if I power it from the Battery, it will be getting 12vdc. I stepped it down because it was said that 7.2vdc was the IDEAL voltage. I am concerned also about the regulator. But, if I go to a 20A, it only gives me 5volts to work with. I need 7v for the arms to work strong. I can't find a 7v out 20A regulator with 12v in. I have to also power two pitman motors and a second H-Bridge from this regulator. Or, maybe I can get it from before the regulator. I am very confused.
Thanks for your help. We will see what other people think.
confused
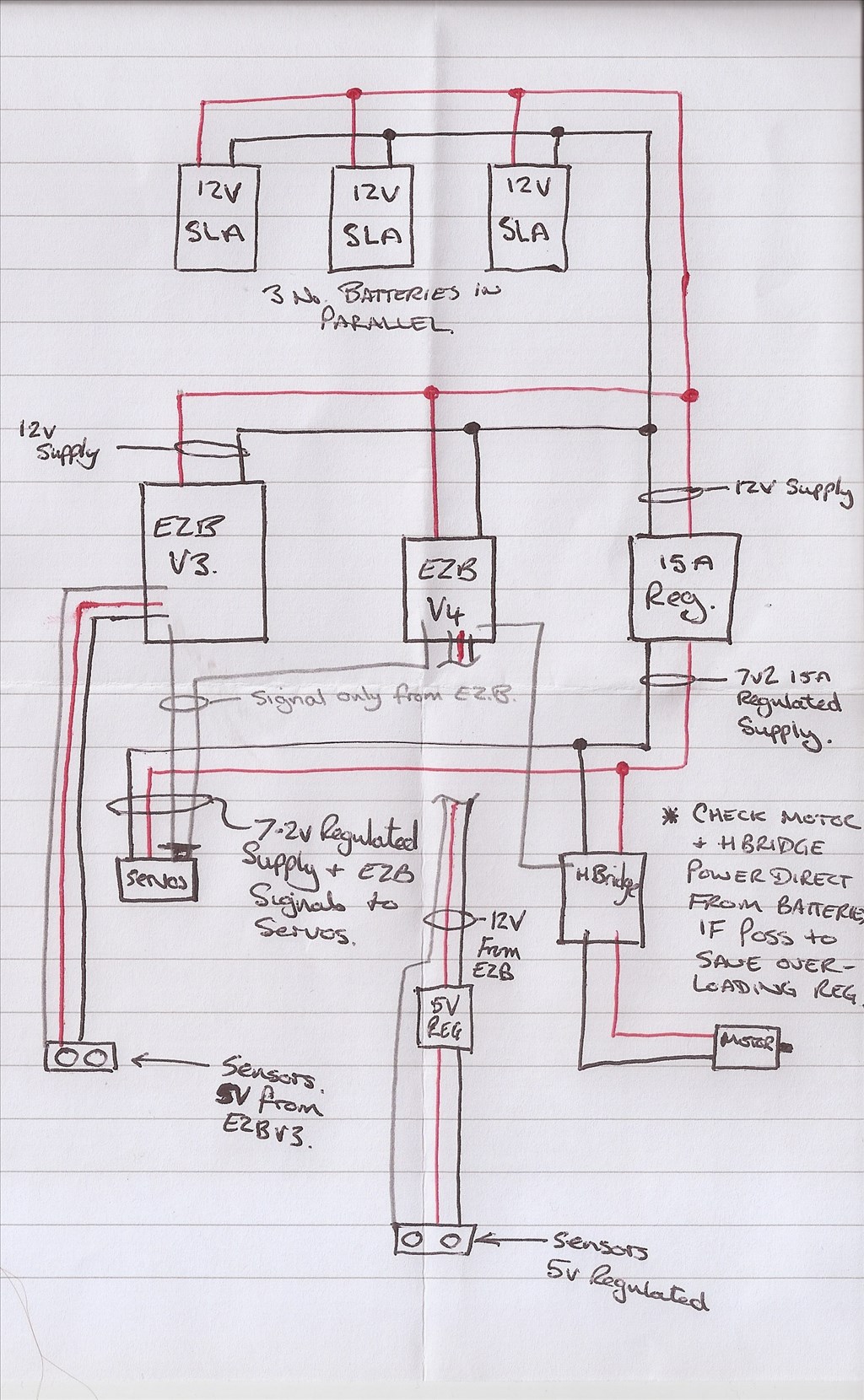
When I get chance I'll draw up a quick schematic of how I would do it which should hopefully be clear enough.
The V3 works fine on 12v. My test rig runs on 12v and the on-board regulators barely get warm.
https://www.ebay.com/itm/DC-DC-4-5-30V-to-0-8-30V-adjustable-buck-step-down-power-supply-module-/301008476906?pt=LH_DefaultDomain_0&hash=item461580daea
@moviemaker , you already have all those 2 amp regulators on the way so why don't you use those? It will add some time to your build but that is unavoidable because no matter the configuration it all must be wired. I picked up some big ones rated at 12 amps for 10 bucks before I linked above.
The problem is, if I use the little 2A ones and I am going from a single source, the source will be combined amps. And , if it goes over 2A I will be in trouble.
Unless you are saying tie directly to the little ones from 12v Battery?
In that case, I run out of room to put all the wires and such. But, we will see.
Maybe I can put the regulators inside the arms.
Thank You all for the answers you gave. You all deserve credit. But, there can be only one, so Rich was the first one to give an answer. Anyone else is welcome to make suggestions. . .I like input.
:D