
smiller29
USA
Asked
Preferred Hardware
I have a question what hardware provides the best feature set when using ARC Arduino or EZ-Robot?
Related Hardware (view all EZB hardware)

Arduino Due/Mega
by Arduino
Synthiam ARC enables Arduino Mega 2560 control with 8 ADC, 13 PWM, 21 digital ports and 24 servos; includes firmware, shield and tutorials
USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
21

Do you prefer Phillip head screwdrivers or crescent wrenches?
So there is no advantage using EZB4's over Arduino Mega interesting. DJ I am not sure what I have done to make you respond like this to my questions. I am sorry if if you feel they don't deserve a better answer. These are questions people have when deciding what products to purchase when getting into this hobby. Arduinos tend to be less expensive than the EZ Robot stuff. I was under the impression the EZ-Robot products and the ARC software were design for each other, but it does not seem like that is the case. I have seen people switch their Inmoov builds over to the EZB4 after having Arduino Mega's so they could get away from MRL and use ARC but I guess they could of just kept the Arduino hardware and not changed everything based on your above reply.
Haha no - what I mean was what is the best tool for the job. I was being witty, not annoyed . That’s what the smile means haha
. That’s what the smile means haha
so the real answer is what do you need vs what can they do. Like, an arduino is powerful because you can customize the firmware to add your own features. The ezb has camera and audio streaming over wifi but the firmware is not open source.
You’ll have to decide what features are relevant to your outcomes and choose hardware based on that. Otherwise if you just want to play, having a selection of hardware to explore is fun too
I was going to answer but I felt that my response would be heavily biased
Well I for one would love your thoughts on the subject.
Ok sounds good @smiller29 I’m at an event at the moment but I’ll try to send you a response later tonight!
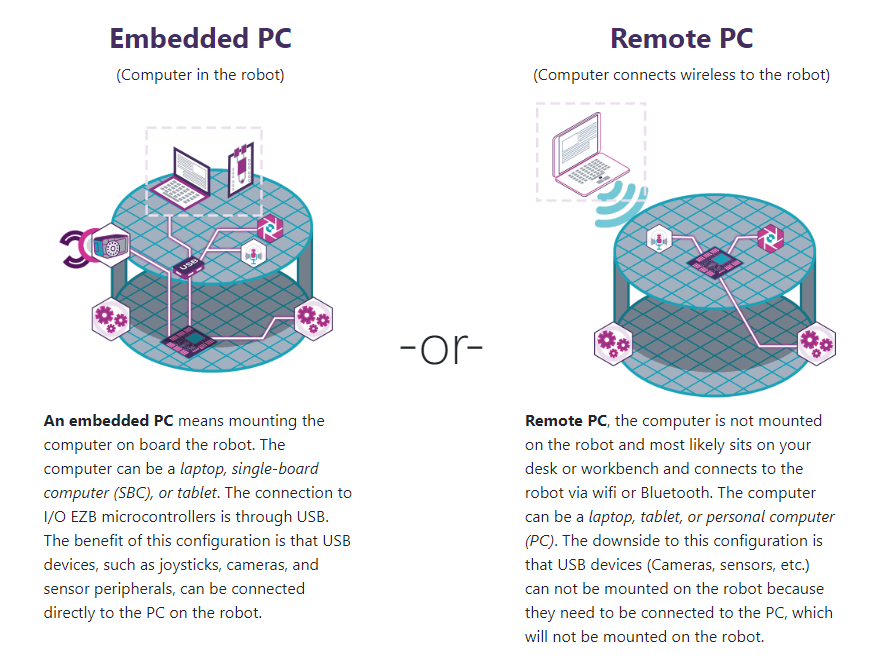
I 100% agree with DJ that it's always application specific. It's all about architecture. One architecture has the computer on-board the robot and the other is off-board. When I was at Synthiam we came up with this diagram that helps depict the two main ARC architectures:
Embedded PC Architecture
If you are using an embedded PC on your robot, it may be beneficial to use an Arduino (or multiple) as the main robot controller(s) due to the low cost. Don't forget that you do need servos shields as well! You can also utilize PC hardware that you may already own (ex: amplified speakers, USB Webcam, Small LCD).
If you have decided beforehand that you would like to use an Arduino (Mega, Uno) with ARC you have then in-effect already made the decision to use embedded PC architecture as these boards require a wired connection to the computer.
If you plan on keeping an embedded PC + peripherals in your robot permanently it may turn out to be an expensive solution if you have to replace/duplicate any of the hardware you used that you may need for future computing or robot projects. It's also expensive from the get-go to have a mini-PC, amplified computer speakers, a small HDMI monitor, HID devices (keyboard, mouse, or touch screen), and a USB Webcam solely dedicated to a robot.
I should note that some of the computer peripherals can be saved if you use a VNC connection to the embedded PC, but the funny thing is that you would be switching to remote pc architecture by doing this. It's hard to justify using embedded PC architecture if you are connecting remotely anyway, you might as well use remote PC architecture.
Remote PC Architecture
If you plan on using a remote PC, the EZ-Bv4 and IoTiny are great options as they have integrated audio and video! It's like having amplified computer speakers and a USB webcam built into your robot controller. They are great for smaller form factor robots as you can use the power of a computer to program and control small-scale robots. They are also great for small IoT projects in general.
The largest benefit of this architecture is that you can continue to use the remote PC for other applications, the only investment is the EZ-Robot controller that stays within the robot. For example, I use my laptop for work almost every day and it doubles as a robot control/programming station when I need to connect to my robots. All my robots have an EZ-Bv4 or IoTiny left in them which is economical for me rather than having an embedded PC + supporting peripherals in each one. Whenever I want to use one of my robots I load up ARC, open the project I made for that robot, connect to it and I'm on my way. Then I can put it away, load a different project, and connect to a different robot in a short amount of time. I don't need to wait to fully boot an embedded PC as you would with the other architecture.
If you have already planned to use the EZ-Bv4 or IoTiny in your design the nice thing is that they work with both architectures. In addition to a remote connection, they can be used with an embedded PC which saves on wiring if you connect to them wirelessly. I've heard of some embedded PC designs that use an EZ-Bv4 as the main controller and one IoTiny in each arm to control the finger servos for each inMoov hand. This saves on the servo wiring needed to go from the main controller down each arm. Only power and ground wires are needed to power each IoTiny.
My Personal Conclusion
While I really do love the idea of using embedded PC architecture in my robots, it's not really feasible for me for the following reasons:
One additional thing I wanted to mention is that with EZ-Bs you are supporting a great company, which loves to give you a personal touch when we can (aka me here on the forum ). I am quite thankful that this community has supported my dream of working in robotics for many years and I am eternally grateful. Your EZ-Robot hardware purchases have supported my livelihood, and I don't have the words to convey my thankfulness for that love
). I am quite thankful that this community has supported my dream of working in robotics for many years and I am eternally grateful. Your EZ-Robot hardware purchases have supported my livelihood, and I don't have the words to convey my thankfulness for that love
@Jeremie, Thank you for your feedback that answers a lot of questions for me. My build is an Inmoov so it is large and I have used a blend of EZB4's and small Arduino's so far in my build and I have my Lattepanda SCB mounted in the robot. I have found so far this to be a robust solution for myself, but I have seen others ask this type of question to me and have not really had a good answer and your seems to be very clear to me.
At the time I started this project I did not have a clue one way or another but I had seen video's where people changed over to the EZB4 and the ARC solution because it was powerful and more stable than MRL. So in an effort to save myself pain and time I went with the EZ-ROBOT products and SYNTHIAM ARC solution. I myself feel this was the best choice overall.