
Asked
— Edited
Possible Rad Project, What Do I Need!?!
Comments made by my parents suggest i'm getting a rad for my birthday june 14(celebrating sooner) So I want to have a plan in place for what ill need to make the rad.
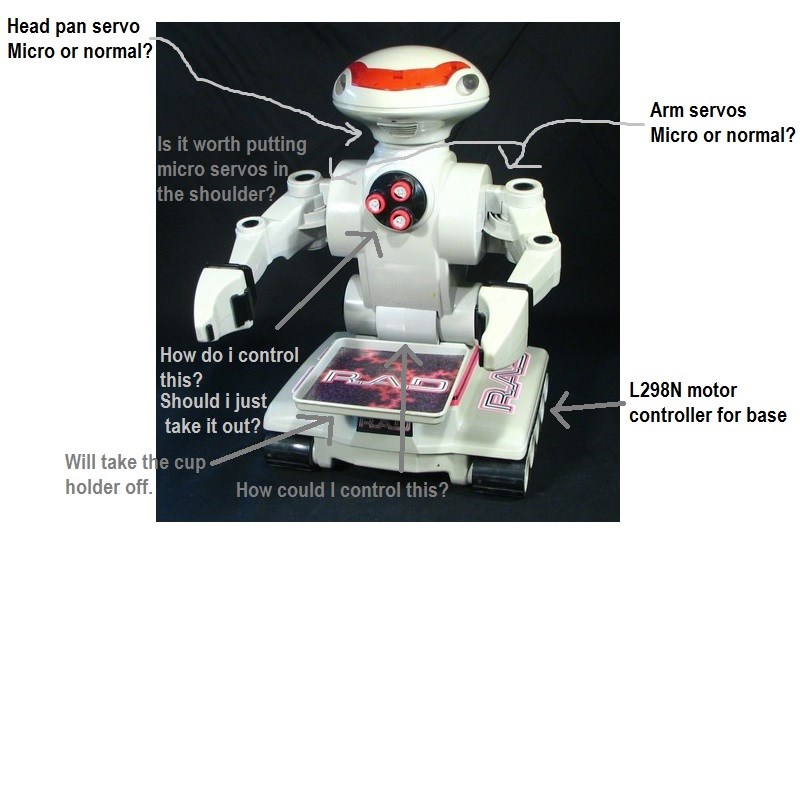
Diagram of possible rad

Add: micro servo and ping sensor where cup holder is
Still don't know what ill need.
Im thinking ill extend the neck to add pan and tilt abilities.
So what i'm thinking is: Head- 2 normal/ 2 micro servos(micro or normal?), camera
Arms- 2 normal/2 micro servos(Micro or normal?)
What should I do with the gun? How could I control it?
And should I add micro servos to the shoulders to make it possible for it to grab things?
Dylan.
Its always difficult planning what size servo's to install on a particular linkage....most people I ...suspect...install a higher torque servo to err on the size of strength. I suppose the engineering way is to measure or calculate the required torque using a spring scale! the rest of your questions are the creative ideas color, personality ,actions noises etc...enjoy
Thanks. to bad I don't have a spring scale!
After my wasted time, effort and money on Melvin I always go high torque to cover it. But, they require external power to avoid browning out the EZ-B, and if you aren't using a 6V supply you need to add in regulators.
Micro servos have very little torque, if gravity is going against them then you may struggle.
You could use a tip transistor switch for the launcher in the chest and connect it to the original motor, I'm not sure how it works but there isn't a lot to it. If you remove it there will be a big hole left to fill, the same goes for the cup holder and battery connection.
The waist will definitely need the highest torque servo you can find, with the arms attached as standard there will be a lot of force on the waist, gravity will try to pull it all down and lifting anything may pose a problem.
Ok so...
The arms don't move up and down, they open/close. From the looks of it, changing that is a fair amount of cutting and bonding.
could you post a picture rich?