
budel0
Hey everyone,
For the last 4 weeks I've been working on my own navigation plugin, that uses ping sensors for it's distance sensing and I ran in to a few problems... Mainly that I'm not a very good programmer... Last time I made a program was in college and that was still in visual studio 2006... and about 2 years ago... But I started with full conviction and dedication that with the power of the internet everything is possible. And so far I find it kind of addictive eek ...
The Goal The goal of this project is to make a plugin that makes my robot and other robots semi autonomous in their navigation. The idea is to have a window with a picture of a robot in the middle and where you click it will go to, both on the screen and in reallife.
The robot will use atleast 5 ping sensors on the front, a Kangaroo for positioning and a compass for determining the direction. Also I will use an arduino to read out the ping sensors and possible others aswell. It reduces the amount of ports required on the EZ-B by a lot.
Short term goals Making all base functions work. By this I mean:
- Drive controls: steering, backward & forwards, position & speed control.
- Reading out sensors: ping sensors, compass.
- More pretty gui features.
Long term goals
- Static object avoidance.
- Applying a tangent bug algorithm for navigation or similar.
When it works Goals
- GPS for outdoors.
- Mapping(possibly a sharp IR sensor that scans).
Current state So far I've been working on a config panel in which one can add all the required data and test features on the robot. This is both for testing and for me to learn how to make each feature so I can I apply that later on in the project.
Some images: Mainform
Config General Settings:
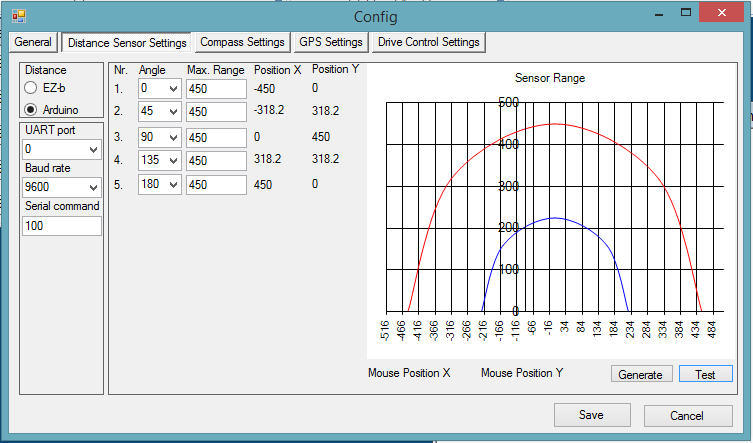
Config Distance Sensor settings:
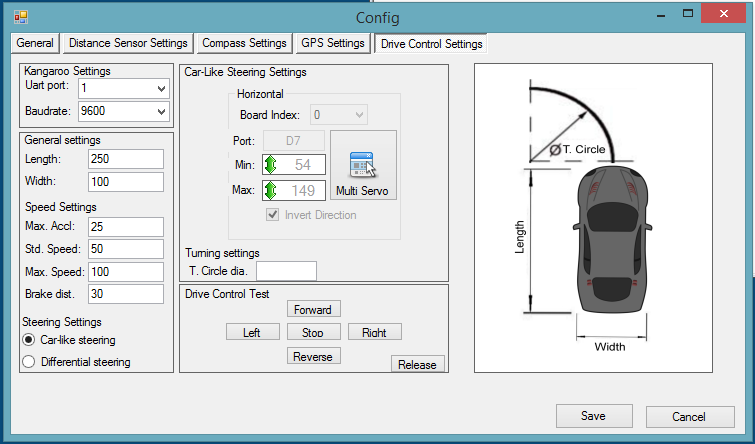
Config Drive control settings:
So what's working so far...
- It remembers stuff... So all variables are saved and loaded.
- It calculates positions based on set angles and set max range.
- It controls servo's.
My current issue: I have not been able to get the UART working... It does nothing... I have no idea what the problem is. I tried reverse engineering it from the EZ-SDK and the Dynamixel plugin that DJ made without any luck. I usually get a long way with a clear example, those got me so far my entire plugin.
I want to use the UART to control the kangaroo and the arduino. For the kangaroo I need to:
- Initialize the baudrate at 9600.
- Initialize the motors by sending: "1, Start, 0x0d" and with a delay(250ms works) "2, start, 0x0d".
- Set the motor speed by sending: "1, s-30, 0x0d" and with the same delay "2, s-30, 0x0d".
It's a work in progress, any help would be much appriciated, I will upload it once I complete the long term goals.
Also a many thank you's out to DJ and CochranRobotics for their plugins without
I would have probably ran a ground way sooner

Time for another progress update. I finished making the GUI for the config tab for the Compass/10DOF imu.
Added features for calibration, corrections and sorts. It also works, which is quite important . So far communication works fine through the arduino. However
I did notice that the response time increases if one of the sensors isn't connected
to the arduino.
. So far communication works fine through the arduino. However
I did notice that the response time increases if one of the sensors isn't connected
to the arduino.
On this note I've completed all my short term goals: Full control over the Kangaroo:
So overall good stuff. Next part of the project will be making the actual navigation part. My idea was to use a "tangent bug" algorithm to do the route planning. I have yet to get idea on how thats going to work. Reading papers about it only confuses me furter, so I found this diagram, which seems to portray what I want to achieve:
It seems to be the logical path to follow, so to be continued.
Great work! I'm impressed
Another week, another achievement. Last week I started working on the mainform, adding it's first features required for navigation. I made a panel which will be used to display and plot a route for the robot to follow. By clicking on various places inside the panel it will generate waypoints and connect these by lines. It has no other function that to show the user the order and planned route. In reality it would only need the x/y coordinates which are stored in a list .
The first waypoint will be the start, the second and third, etc. will be the destination.
.
The first waypoint will be the start, the second and third, etc. will be the destination.
I also added a panel which offers the user the ability to select waypoints and see it's coordinates inside the panel. The coordinates are based on a graph where the middle of the panel is x=0/y=0 and every pixel counts as 1cm or 1 inch depending on the values given by the distance sensors. Ofcourse I took it into account that sometimes a larger field might be required, so I added a scaling feature to it in the config.
I have had some issues getting this to work. My biggest issue was storing the previous line drawn... The new one would remove the old one >.<. In the end I found out that my approach was wrong and I followed a different one which did work out and was way, way easier.
Next on my lists are more features for the waypoints. Removing and adding waypoints. Displaying something that looks like a robot and displays real time information. Displaying the object resembling the robot with a heading relative to the north inside the panel and possibly sensor distances.
For the sensors I'm thinking half shaped circles growing in size the further the are. relative to a 30 degree angle from the robot. As most ping sensors have a 30 degree spread. So these circles will be projected inside the panel relative to the position of the robot, sort of making a map. Very low resolution ofcourse.
So far I'm getting closer and closer to the navigation part .
.
"Small" update on this project: I've been working on and off on this part of my robot project. So far it's a great learning experiance. Just whish I had more time. Anyways, I've made the first start of the object avoidance part of this plugin and it's working which is fantastic. It will now, based on sensor readings stear or reverse away from objects.
It's still quite slow, but it's a start.
My next goal will be to speed it up, get faster response time and add compass data so it'll stear around and object and will continue on it's route.
This is looking really good. I look forward to watching your progress.
Alan
That's great. Writing a plugin for this is an awesome idea. Very impressive and it must be a lot of work. I really wish I knew how to write the type of code needed to make one. Sounds like I need to add this to my bucket list.
Ya, not having enough time for things we like to do really does suck. I understand. It's one of my main gripes in life. However, it does help me to appreciate the time I do have and if this is my biggest problem in life I guess I'm doing pretty good.
However, it does help me to appreciate the time I do have and if this is my biggest problem in life I guess I'm doing pretty good. 
Nice work so far and I'm enjoying watching your build. I love the way you've worked through each step and problem. Thanks for sharing your progress. Please keep it coming. It's very inspiring.
So after careful consideration and lots of testing, I've decided to make a major change to this project.
As it's currently configured, for the project you basically have the EZ-B as main controller, which controls:
But I've ran in to a few problems and noticed that I cannot achieve faster response times between, the Arduino to the EZ-B to pc where the distance measurement data is processed, after which a reaction is made and send back to the EZ-b, e.g. an object is in the way and it should steer away.
Now the problem is that the distance sensors don't read far enough distances that I can plan a head and avoid objects in time. It's also my goal to make my robot fast which requires an even larger measuring distance en furter a head planning or faster reads from the sensors.
To Solve this problem I've deciced that the cheapest option is to stick with my current sensors and increase the read out speed. Due to the communication to the place where the data is being processed being to slow and quite far away so the solution I've come up with is to decrease the "distance" between reading out the sensors and the place where the data is processed. So I've decided to move that part to the arduino reading out the sensors. So all controls and navigation regarding will be processed and executed by the arduino so the whole loop gets significantly reduced in length. Which should result in way way faster response times.
So what does this mean? Well I'm going to rewrite a large portion if not most of my plugin and arduino code. Most of the code is based around settings, testing and controlling the individual components, i.e. kangaroo, serial ports, servo's. All of that will be moved to the arduino. The same will happen for the actual object avoidance part of the code, which so far supprisingly enough is only like 10-20 lines code.
Where does the EZ-B come in now? The EZ-B will still be important, as it will tell the arduino what to do. At first it will give a heading and a distance to traverse, with plans for gps on the arduino. So the EZ-B will send GPS coordinates.
So for now I'm waiting for a shield for my arduino mega 2560, so I can switch out the arduino nano I'm currently using. I've already rewriten a large portion of the code for the arduino, drive controls for the kangaroo, servo's, ping sensors and the 10DOF IMU. I've also tested the first few parts with good results. Once I've switched out the arduino and rewired my robot I can test more features of the code after which I'll start reworking the plugin.
The plugin will still have features where one can test the individual functions and ofcourse plot routes and start/stop it.
So yea, lots to do and much to think about.
If anyone would find it usefull, I can post my current plugin so parts of the code can be used for other plugins or C# programs.
Why dont you use the ping sensors directly in the EZB. I have my robot navigating with 3 ping sensors and they respond instantly. Why use arduino for this?