
dodi
Germany
Asked
— Edited
When I start the camera of my Roli, it produces some noise (rattling), when I stop it the noise disappears. Are there any movable parts inside the camera bit?
What could be wrong?
Also the camera does not always have the proper network address. I have to adjust the robot address whenever it connects to my WLAN (client mode), and until the recent update the camera address followed what I entered in the Connection window. But since the update to 2015.02.06.00 (firmware v16.6) I observed both the noise and the lack of address synchronization.

@rich
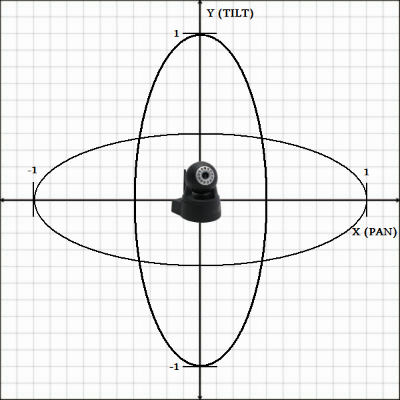
I think that you confused the axes. An object on a vertical axis can be turned into North, East etc. directions, that's what I understand as "pan". WRT to the camera picture, this movement would be left/right, along the horizontal image axis. Accordingly "tilt" would go from upwards to downwards direction, along the vertical axis in an 2D image.If you don't understand the difference, take a look at e.g. 5 coordinate NC/CNC machine tools, which allow for moves in 3 linear directions (translation) and 2 angles (rotation). A linear translation moves from one coordinate to another one in an 2D (flat, map...) coordinate system. A rotation instead occurs in place, not changing the linear coordinates of the object.
Linear coordinate systems often are called Cartesian coordinate systems, when the axes differ by 90degrees angles (orthogonal). Since a combination of multiple rotary servos rotates (turns) the coordinate system, it should always be specified whether axes and coordinates refer to the outer world system (geographical: E/W, N/S, ground/sky), to the moving robot system (forward/back, left/right, up/down), or to the translated system, like the camera viewing direction (up/down, left/right, landscape/portrait).
As to the assignment of servos to the X and Y axis in the camera settings, open the Roli example program. If you don't know how to open it, download and install the latest ARC. When you start the program - I hope you know how to start a Windows program? If not simply ask, I'm sure that the community can provide more assistance. When the program starts, select the ROLI robot course and follow the instructions. If you don't have an Roli at hand, for now it's sufficient that you construct a robot head, consisting of two lever servos and a camera on top of the servos. Connect the servos to the indicated ports. If you don't know how to connect a servo to an port ...
Then you may be able to answer these simple questions:
What's the servo number for the X axis in the camera settings dialog, and which is the number for the Y axis servo?
As a more sophisticated example, what are the servo numbers when you don't want the camera to follow an object, but instead want to point the right arm into the direction of the tracking object, not moving the robot or the camera (stationary case)?
In the latter case you may notice that you have to calibrate the robot arm movements, so that they move by the angles corresponding to the positon of the tracked object. This seems to be one use of the Min and Max positions in the camera settings, as seen by the camera. Another use is limiting the arm movement, so that the arm keeps away from the robot body. Can you obtain settings which meet both goals? If not, why not?
@Rich
David could help me in digging into the most important parts of the router configuration menu, so that I could find out how to identify the Roli IP address. Later on I found an entry "Feste IP-Adressen", and entered the Roli MAC address and desired IP address there, and everything looked nice. But as mentioned in multiple postings since then, the router does not honor these settings, most probably they apply only to cable connections, not to WLAN clients. Do you need instructions on finding such postings? Then have a look e.g. at the begin of this topic, to which you just responded.If you are such a clever boy, you certainly can convince my Internet and phone provider to supply me another WLAN router, that matches the EZ requirements. Or give instructions on using my old Fritz!Box WLAN 3050 for a secondary WLAN connection reserved to the Roli, and how I can use it in parallel to the Internet WLAN router (on Windows 8).
TIA for your assistance :-)
@Rich
I stopped building my own computers in the mid 80s, when the Atari ST was the first system that met my requirements. When moving to Flensburg, 10 years later, I gave all my electrical and mechanical stock to my neighbour, retaining only the most frequently required tools (hammer, German screwdrivers...). Since I started playing with an Arduino I'm extending that retained equipment. I didn't realize what a bunch of special tools and devices is required to make an EZ robot work :-(@Rich
At school I learned that "an" also is used with the accusative case, isn't it?I also make a difference between official documentation, which should be free of typos and other errors, and informal conversation, where I do not expect perfect spelling from non-native English speakers - do you?
@bborastero: Thanks for the information :-)
I still have problems with the English technical terms, which I didn't need in discussing programs and coding in the past. But I'm an old dog now, and only can hope that I'm still able to learn and remember new tricks ;-)
I have not confused anything, it is you who has the axis confused, unless you are stating that I along with millions of internet users, the ARC software, every video game, every IP camera with Pan/Tilt function and a lot more have got it wrong... My explanation has been confirmed and backed up by others who have provided you with further graphical aids and terminology pulled from the internet. Do not assume that because what you are told does not match what you thought was correct that the person correcting you is wrong, such an attitude will not get you far.
For further confirmation and clear guidance here is yet another image explaining the X and Y axis for a camera;
We are not talking about a co-ordinate system, we are talking about an object rotating on two axis. The two are very different things. I think the fact that every tutorial EZ-Robot has created has been completed as can be seen in my profile along with the 33 robot apps created and shared and 320 plus questions answered which are credited to my profile plus the hundreds of questions which were before the credit system should indicate my level of competency. In case you are unable to find it, here are the stats;I do not appreciate your tone and since I am now one of a small handful left are willing to help you it's probably a good idea not to act like a tool.
Your question is unclear. Please ask again with more information. Do you mean port numbers? This will depend on the ports that the arm is on. It would also require relative tracking to be enabled. I corrected your spelling mistake above. Yes you can obtain settings to meet the goals. Again, it would depend on the arms. Since Roli is the one EZ-Robot I do not have I am unable to advise on exact settings. Or you could, and I know this is a little out there but you could buy a router which would make your life easier if the issue your router is causing you is such a disastrous one. Standard screw drivers are not special tools. You need the same screw drivers to open any battery compartment for electronic toys amongst thousands of other things. You have said that the camera works therefore you do not need this screwdriver to make it work, you need it as you believe there to be a problem with the camera. Nope. "Using an and a does not depend on the spelling of the word it comes before, it depends on the pronunciation of the word. In most cases though, an is used before words that begin with vowels (a, e, i, o u.). If a word starts with a consonant sound, use a."Yes I am being pedantic and mocking a little since you are so picky with the typos I just presumed you would have perfect spelling and grammar yourself, or at least would appreciate being informed when it wasn't. I know I appreciate it when I am picked up on it and as many members would confirm, they know something is wrong if my responses are not written without errors.
A final note. As I mentioned above, I am now one of a very small handful of people who are willing to put up with you and provide assistance. Your disruptive behaviour, attitude and insults have been the subject of quite a few emails in my inbox with statements such as "how do you have the patience...", other members of the community have openly voiced their concerns also. While the community here is very friendly, open and welcoming we do not tolerate disruptiveness, rudeness nor these superiority complex attitudes you seem to be displaying. I would highly suggest that you change your behaviour if you are hoping to continue to receive guidance.
@dodi I read through posts and was moving from irritated to angry, then I saw this:
I realized that must be a punchline to a joke. I laughed so hard I spit my coffee.
Below is a picture if the highly specialized tool called a Phillips screwdriver like the one I use. It happens to be a 3.0mm X 80mm one and it works perfectly for the screws used by EZ-Robot.
I don't know how you managed to go the last 60 years without needing one but that is probably a feat to be congratulated on. At any rate, I hope this picture helps you track down what you need.
From here on out I think I'll just bring my popcorn and watch the show.
@Rich
You are, confusing axes and planes :-(Take a single axis, say a vertical flagstaff. Then you can move along it (climb it up and down, vertical translation), and you can rotate around it (pan in the horizontal plane). That's the agreed mathematical definition of an axis. The associated plane is orthogonal to its axis.
In case your (technical?) definition is different, please explain.
I'm willing to accept that a so called "Neck Horizontal" servo" allows for a movement (turn) in the horizontal plane (pan). See Roli Assembly Instructions step 11 (https://synthiam.com/Tutorials/Lesson/63?courseId=3). Question remains whether this is the servo to specify as X or Y axis servo in the Camera Config Settings dialog.