
Asked
— Edited
Newbie
:P
I have couple question about the kit.
If I have servos HS 645 can I use with EZ robot brain.? If I can than how many can I use up to ?
I am really interesting about using lipo battery? However if I use servo HS 645 than do I have to do any adjustment?
Last question, if I purchase I complete kit , which is include heavy duty servos. Are they same size as HS 645 servos?
Thank you.

Good point to know , thank you Allan. I will put it into consideration for future needs. For now, with some calculation 1EZB brain and 24 servos from EZ will cost me $388 stress eek eek eek eek Any deal ?
Get me if I am wrong.
The purpose for my bot would be autonomous exploring surround erea and processing the information to generate a map. Therefore the EZB program will provide me an environment to monitor the robot and magnet the information right ?
:P
Yes, ARC is quite powerful but at the same time easy to use.... Make sure you buy the camera too.... Then your robot can track colour, objects and even your face....
You just missed the Cyber Monday 20% off sale, which would have helped a lot.
The developers kit comes with some servos (although 2 of them are modified 360 rotation, so may not be useful for your project) but also has a ping sensor and camera, so that has some built in savings. Also, the 3 servo arm or the "scorpion" kit has a built in discount. Basically you get the claws for free (although they are micro servos, and the servos you do get have the EZ-Bit plastics and don't have the original servo top, so if trying to fit in an existing chassis, possibly not a good idea).
If you have any existing robot, EZ-B is currently holding a contest for the best holiday themed robot video. The winner gets $200 in EZ-B credit.
Also, answering other member questions gets you $3 in EZ-B credit. A lot of questions can be answered just by being skillful using the search and playing with EZ-B software, which you can learn a lot of before owning an EZ-B.
Alan
Wow so many contests. I am so ready!
:D
PS I will upload some of my robot video later .
.
Saving for EZ- B complete kit right now.
Do a little study about ARC, love it, however i only could read the manual for now but I already recognize the power of The Scrip.
The other day, i was sharing the goal for the robot. Today I have couple question for the educational goal.
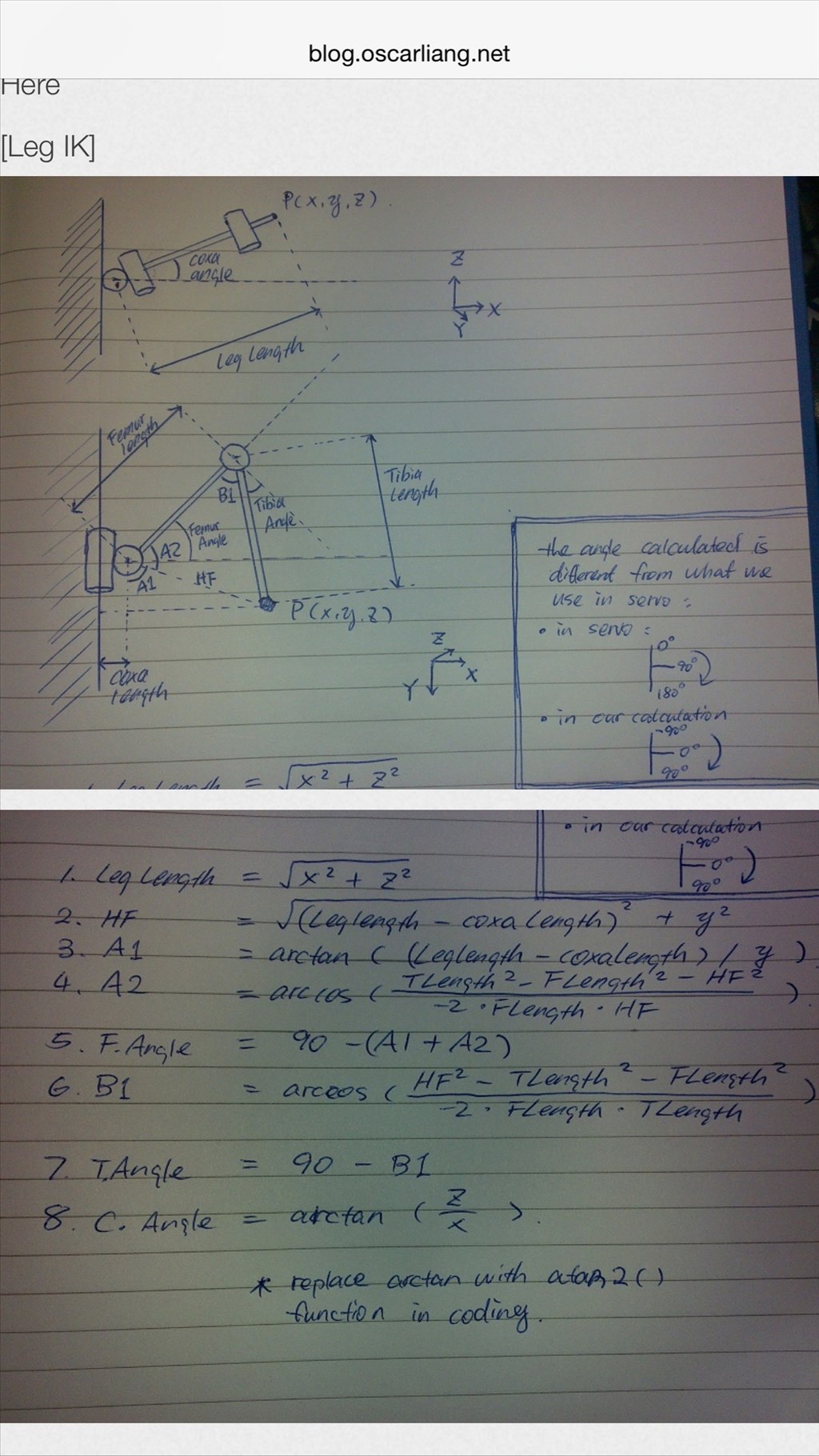
My educational goal in this project is use invert kinematic . if I know the fundamental algorithm for body IK and Leg IK can i use ARC to execute it ?
I realize that invert kinematic to control robot, however can i use it for autonomous movement ?
For Example: if distance in front empty, use IK function to calculate the angle of each legs and execute moving auto balance moving forward ?
blush
If i get the complete kit, it come with rechargeable battery, however if i want to use lipo battery what connection should i purchase ? blush
i am planning to get the complete kit from roobotshop.com and order extra servos from the website ? or should i order everything from EZ-robot.com ?
i am extremely new to the programming field , so hopefully everybody don't mind about my newbie question,
Any servos work with the EZ-B, but the EZ-robot HD servos are the most powerful for the price. The EZ-B comes with the power base (i think), which means any barrel jack connection will work with it. Just unscrew the base and you have a handy dandy little barrel jack-to-EZB power connection, which works from 4.5v all the way to 16v, so basically any battery within that voltage should work fine.
also - mind rewording that inverse kinematic paragraph? I would be glad to try and help but I don't really understand what you're saying
I'll just try and guess what you were asking about - yes, the EZ-B can use the sonar sensor included in the Developer's Kit to find it's way around a room on it's own. the Auto Position control can be used to reach a desired position, and then stop at a certain point and continue it's movement. You can read more about the Auto Position controls in the learn section, I believe. I'm not exactly sure about making it so the robot can autonomously detect a surface so that the legs would connect to uneven ground, but I bet it could be done somehow.
I hope these pictures will explain it. . The source is from https://blog.oscarliang.net/inverse-kinematics-implementation-hexapod-robots/
. The source is from https://blog.oscarliang.net/inverse-kinematics-implementation-hexapod-robots/