
Asked
— Edited
Need A Way To Monitor The Ezb4 Serial Ports
Now that the EZB4 has arrived is there a way we can monitor the three serial ports using the ARC terminal GUI ? Not all at once of course, just one at a time would be helpful.

Can you be more specific of what you are asking? I'm unsure what you mean, sorry
No problem DJ, lets say that I have hooked up one of the serial ports to the Roomba and the Roomba is sitting on a home base. Normally when charging, the Roomba outputs a ASCII battery charging report every second. This report continues until the Roomba is removed from the home base. There is a software reset command "7" that clears all dynamic registers and re-starts the charging process. At the same time the software version is reported.
That charging info would be helpful in determining battery status prior to setting up for sending commands similar to what is done using the D0 port now.
Hi @Robot-Doc, you can always use the "UART Peripheral" example (under Examples->EZ-Script Function Syntax) in ARC to collect data and print it out to the script console as data is received. It's a pretty handy example, I've used it a few times myself
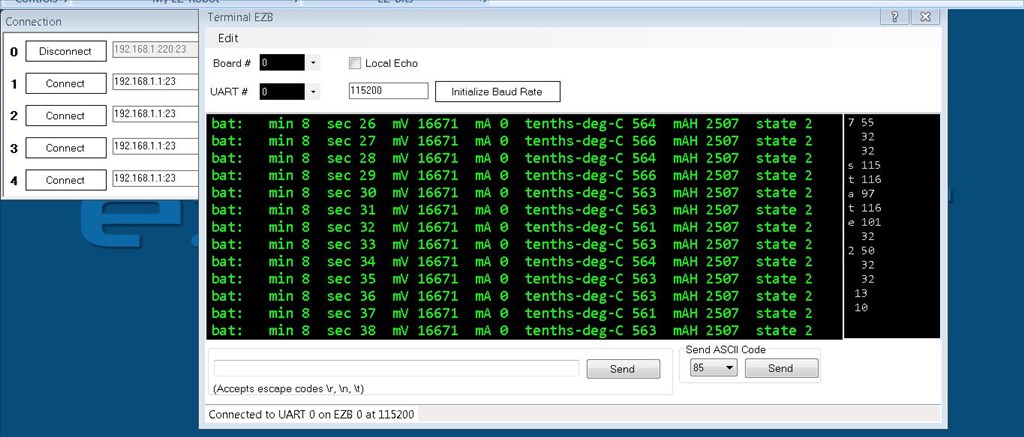
I created a Terminal EZB that will be in tomorrow's release of ARC. I have to test it first. It turns the EZ-B v4 into a Wi-Fi serial terminal
Oh man, I thought I had trouble sleeping.... wow, another great addition to ARC... Just what the Doc ordered....
OMG, just what i needed..i think!
Thanks for the creation of the WiFI Terminal for EZB4 DJ, that is so cool.
Jeremie thanks for the UART peripheral tool clue using the script console.
DJ, you have made my day, thanks for this tool. This lets me monitor live battery reports as they are happening on the Roomba. This will also work on the Create.