
Troy
USA
Asked
— Edited
Multi-Servo Question
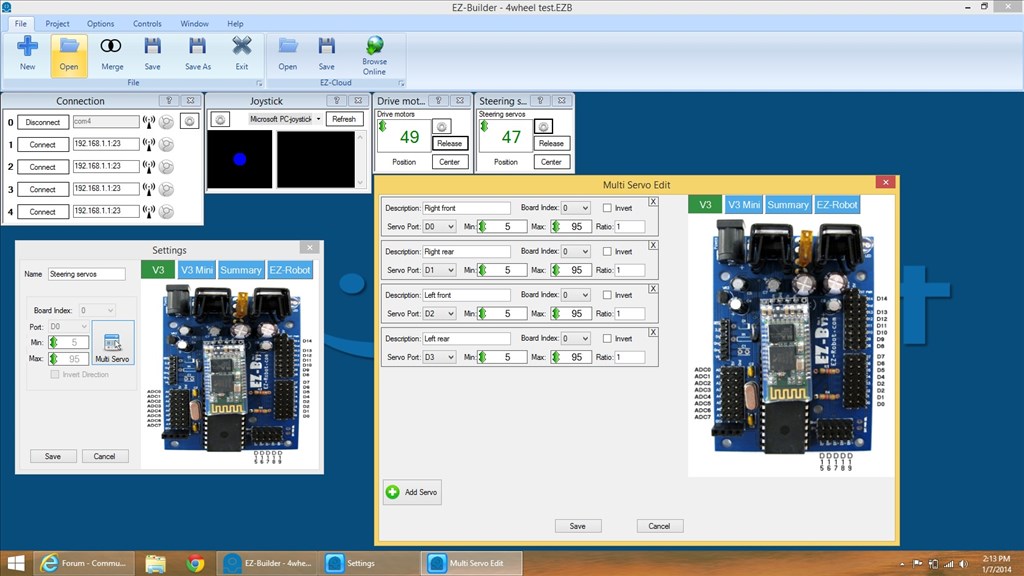
I finally got around to testing out my steering and drive. The problem is that only the first two servo of the four are turning and being controlled by the joystick. Some additional info for troubleshooting:
- The servos were not powered meaning they weren't holding a position and I could turn them by hand. If I click on "servo center" then the servos would center, hold position and still not be controlled.
- The digital ports do work if I make a separate servo control and control it with the slider.
Here is a snapshot.
EDIT: LOL OMG I know what I did! Nevermind! hehe I started my testing with the multi servo with 2 wheels in the joystick control panel's "multiservo" config. Later I added the separate control outside the joystick control with "multiservo" config as well. All, good now that I sorted it by deleting the extra servo control panels and did it all in the joystick panel.

At least it was an IO error. Those are usually the cheapest to fix
Well done for fixing it yourself and not giving up!
@Troy Thanks for posting this umm selfbug! and the solution. Others may very well use the same incorrect procedure using multiservo control with extra servo controls! Good to hear your pushing forward with your project!
Thanks for posting this umm selfbug! and the solution. Others may very well use the same incorrect procedure using multiservo control with extra servo controls! Good to hear your pushing forward with your project! I am sure I have posted 4 or 5 trbls in the past only to resolve them myself within half hour of posting!
Glen
I am sure I have posted 4 or 5 trbls in the past only to resolve them myself within half hour of posting!
Glen
@irobot58, yeah it happens. I couldn't delete the thread so I just went with it. Meh. :/ It was cool driving the base frame around with the temp wiring. I need to get back on that and figure how I want to mount the main battery and cards (ie. EZB, DC-DC conv, terminal blocks, etc.)