
PRO
afcorson
Australia
Asked
Mixing HDD And HD Servos
What happens if you mix HDD servos with HD servos in your robot? Will only the HD servos jump around or will others move inadvertently too? Thanks.
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

That's correct, only the HD servos will move on initial power up the HDD servos will not move (they have a completely different internal electronic design).
Deleted. Look away.
What are the HD and HDD servos ? I only know usual servos .
leonardo46
HD is anologe and HDD is digital.
HD and HDD don't help understanding . Both seem digital ("D" and "DD"). I never saw those acronyms for servos.
HDD comes from heavy duty digital servo.
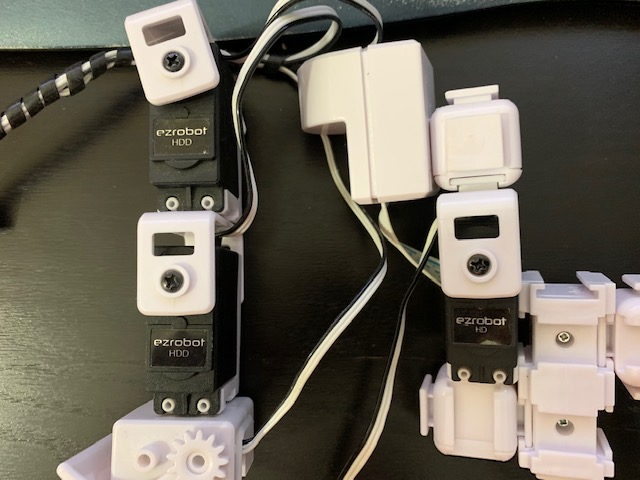
servo info
Left side: 2 x EZ-Robot HDD Servos (Digital) Right side: 1 x EZ-Robot HD servo (Analogue)
Analogue x Digital servos:
There is no physical or main component difference between a digital servo or analog servo. The servo case, motor, gears, potentiometer all have the same purpose in both types., the exception is the PCB i.e. board.
The difference between the two is in how the signal from the receiver is processed and how this information is used to send power to the servo motor.
Analog: An analog servo controls the speed of the motor by alternating on and off voltage signals or pulses to the motor.
Digital: A small microprocessor int the servo PCB analyzes the receiver signals and processes these into very high frequency voltage pulses to the servo motor. Instead of 50 pulses per second, the motor will receive upwards of 300 pulses per second. The pulses will be shorter in length, but with so many voltage pulses occurring, the motor will speed up much quicker and provide constant torque.