
Asked
— Edited
Ideas For My New Ez-Robot Developer's Kit
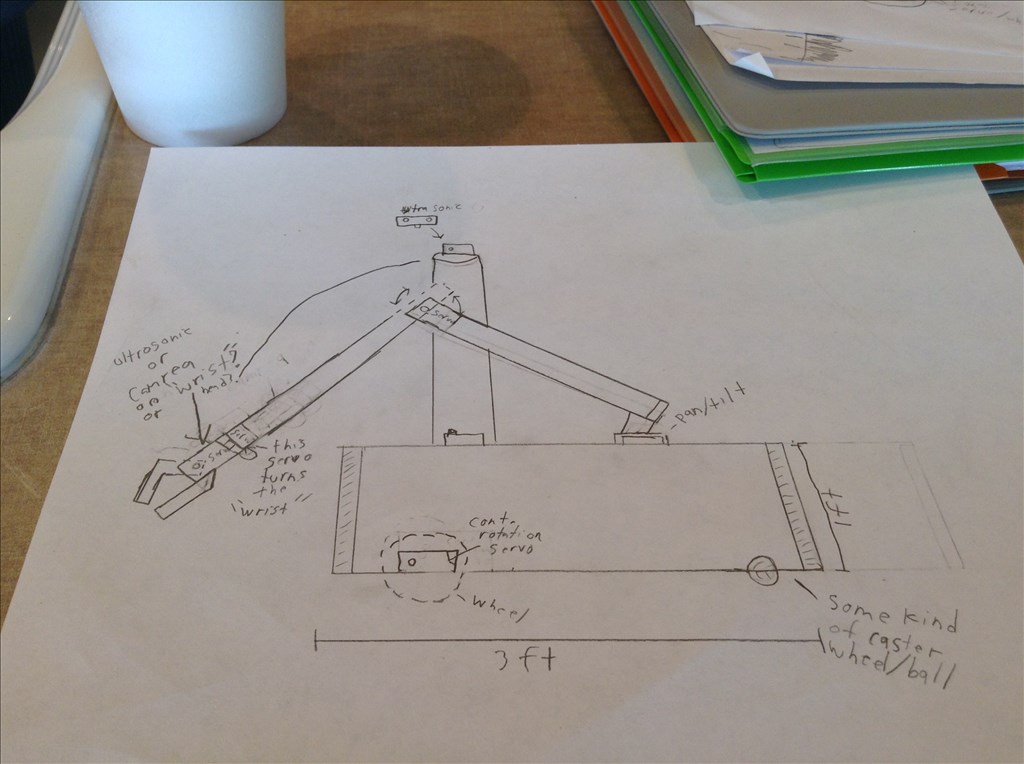
I got a Developers kit for my birthday, and I'm still debate what I'm going to do with. I originally wanted a humanoid-style robot, but the servos most likely won't stand up to the weight. My final design is in the picture below. I went for the rover style robot with an added arm/claw. I however am still open to ideas. Here is what i would like to have ideas for:
Materials: I need something low cost and easy to work with.
Size: How big could the base be? I know I already have the dimensions, but the only DIY building experience I had was with LEGO Mindstorms. I would like the claw to be able to reach over the edge of the robot.
What could I use for a caster?
And just anything that might help.
Thanks and happy building,
CONNXT248

You got the new V4 developer's kit.... Sweet
Wood, would make a cheap base... However, for an arm that size you going to need some serious servos in the base (shoulder) like a Hitec HS-805BB giant Scale servo and for the elbow something like a Hitec 755HB giant Scale Servo... I would also recommend some DC motors instead of the CR servos that came with your kit... This means you will need a motor controller too.... To keep things within the contents of your kit you are going to have to shrink down your design and lighten it quite a bit... Also you can buy cheap furniture castors of various sizes from pretty much any hardware store...
Servo city gearboxes allow you to easily get 3 to 5 times the torque from a standard servo. They are worth it for shoulder s and elbows for a robot.
You can also use ebay and Amazon.com to search for robot kits. Some even come with two motors and wheels as well as a small metal ball bearing castor.
I can give a few insights on your design.
2.If your using the basic robot drive style, the closer the drive motors are to the center the better, so depending on the scale of your bot, it might not be able to turn properly.
3.The pan/tilt servos would need to be supported to avoid I.Breaking the servo drives, and II.Keeping the mount from breaking under stress.
Size of 2ft long by 1-1.5ft tall would be ok in my opinion.
In my drawing, the sides could be painted cardboard, with a skeleton of light wood, and a wooden sheet as the bottom of the bot. Cardboard for the turret and light wood for the arm.
Enjoy your new adventure! Tech
back view.
First of all, thanks for all the help! I would proably break my kit if I had not asked. Second, any videos/ web pages that could help me with stuff outside of the kit, like the DC motors? Like I said I am only 13 and don't have many resources/ people that I could go to.
@jstarne1-XLRobots.com where could I get a gearbox? I think I will try to use some of those.
@technopro: thanks for the diagram and the weight distribution thing. I didn't think of that.
I'm 14. You'll learn. Motors and battery go hand in hand, so you have to know the motors, and then get an ok battery.
Motors, you have to know how heavy the bot will be. My guess is under 10lb. These are motors I used. Not strength tested but touched them to a battery and the shook the bot with the torque.
www.ebay.com/itm/Mini-Robot-12V-150rpm-Assembling-Driving-W-37GB555-DC-Electromotor-And-Tire-/161096747306?pt=LH_DefaultDomain_0&hash=item25821d492a
To use the motors, you need to get the L298n hbridge(2.5A motor controller) from the ez-robot shop or somewhere else. Here you go, but ad looks a little sketchy for the price. www.ebay.com/itm/Stepper-Motor-Drive-Controller-Board-Module-L298N-Dual-H-Bridge-DC-For-Arduino-/181029044810?pt=LH_DefaultDomain_0&hash=item2a262c024a