
Asked
How Do You Pick Something Up?
If we have a stationary robot and a stationary item sure we can pick it up, but if we have a robot that can move and an object that can be anywhere in any orientation how do we pick it up?
We have Lidar, we know where the robot is with Realsense, we have object recognition and yolo so we can find an object, we have servos like dynamixel and hacked HDD that know their position so what else do we need in order to pick something up?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

Also note, that you'll probably want to limit the number of detected objects to 1 in the camera device. Because you're only focusing on one object at a time.
See this screenshot, change that to a 1
Thanks that is helpful.
this problem is working out harder than I thought. Look around room, Find pen, goto pen, move into position in front of pen, align claws to angle of pen, align robot in pickup pen position, pickup pen.
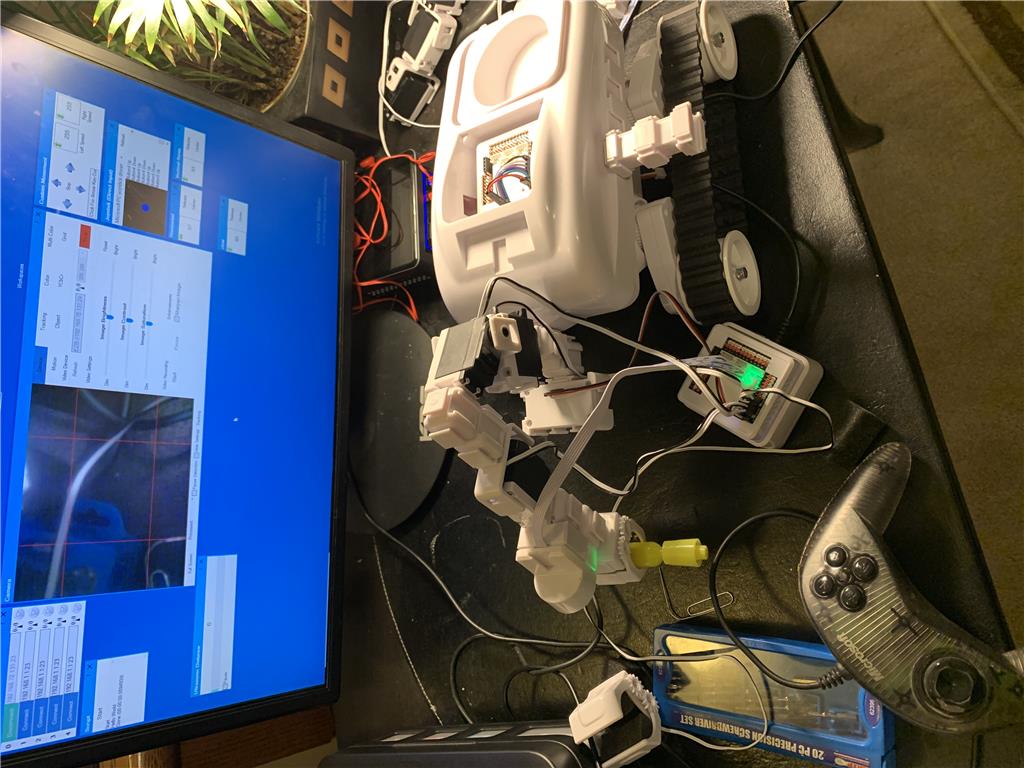
You see all these robots with claws and hands but they are all pretty useless without being able to actually pick something up. Anyway getting closer. Here is what the latest monstrosity looks like but now I need to add another servo as I need another DOF for certain pen angles.
Haha that is so awesome!!! Can’t wait to see it operational. You’ll hit a Moment of eureka and it’ll all click