
elfege
How To Use Severa Glyphs Or Objects For Docking Robot
Hello everyone,
I'm opening this new thread because so far I still haven't resolved what looks to me either as a limitation of ARC or something wrong in my config, but I'm not sure so I'm checking.
I have succeeded in having my robot docking by itself, to the point where it will try again and again until it succeeds, re-centering its position toward the dock. So far, so good, I tried it several times and each time it eventually succeeded so I'm quite proud of the achievement here. I posted in a different thread a video and the EZB file for those who are interested, just do a search using my name, Elfège (it should work without the accent on the è).
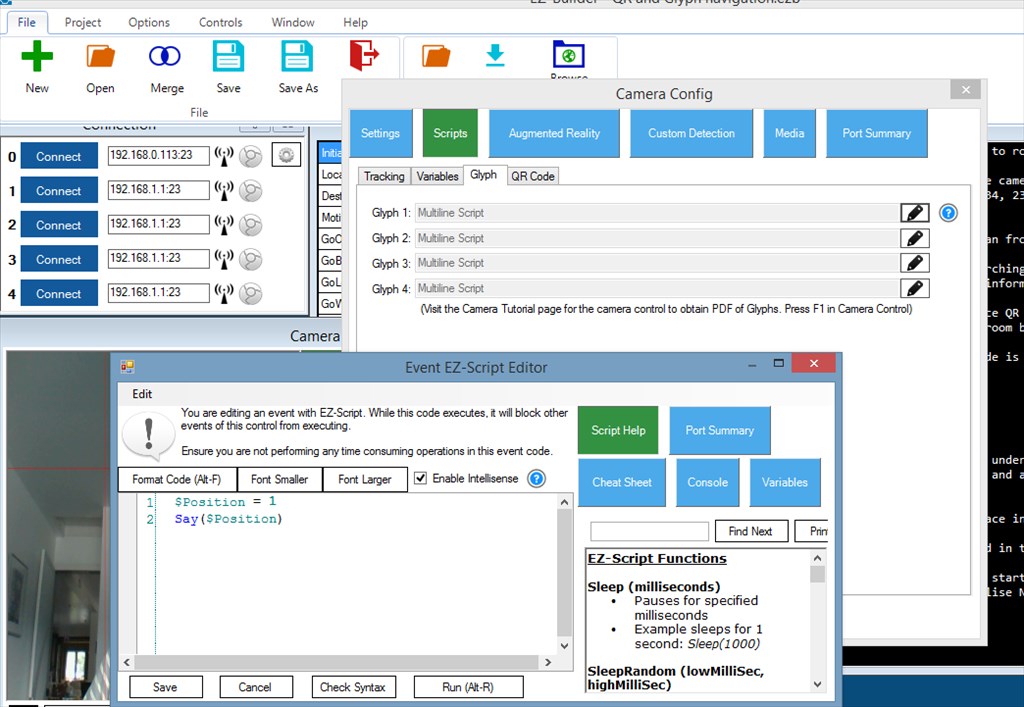
Now, here is my question : although it works better than I expected, I still can't figure how to use severa glyphs for differentiated actions.
Each time I tried to use the glyph1, 2, 3 and 4 in the camera settings, it would always prioritize the script start menu content or, if I don't have anything in the script start, most of the time it won't recognize the glyph although it detects the object as A glyph but never or almost never as Glyph_1, 2 or 3.
Knowing how to do this reliably is the only way to achieve a full track back to the docking station.
I thought of using color, object or QR detection, each time the same problem : either priority given to the sole "script start" content OR totally random results.
I looked online for some codes I could use to have the objects identified reliably within a separate code (in the script manager), but same result : no reliable detection/identification.
There must be something with my config and there's another symptom that seems to indicate that : When I tried to work with QRcode it would literally NEVER recognize them, even after tons of frames while the robot and its camera stood in front of the QR code. It would only say something like "QRcode detected, coordinate, coordinate" in the debug.
So here I am, with a perfectly working autodocking system that is efficient for it is ultra-simple (it was really hard to find the simplest and therefore the most efficient way to achieve that, there's some good old French-cartesianism involved here I guess...).
Any idea?
Thanks A LOT in advance to whoever will bring some light to me!
My config : AMD FX 6300 16GB DDR3 Windows 7 ultimate
2 EZB V3 working in parallel
tried the detection with both my old EZB V3 wireless camera and the Kaicong IP camera that I prefer to use for most of my projects (because it is cheap about 30 bucks and has night vision).
Sincerely, Elfège.

Well, the problem I'm having is that I can't use several different glyphs as my system 1) doesn't clear the last glyph (either by using the clearlastglyph command or by seeing another glyph as suggested) so 2) whatever the variable I define - like you did here - it will still say/print "I see the glyph_1" when it's actually, now, the glyph_2 or any other and the debug doesn't show Glyph_1 like it used to be some time ago, but only "glyph" then position, by name (Middle, Middle) and then in pixel in the camera's field/grid. But never any identification of a specific glyph.
That's where I'm stuck... and I really can't figure what is wrong in my config... Even with a new project and simple script the debug will never show the name of the glyph being seen. It will clear the last glyph if it is given to see an object not long after, although the object will be seen everywhere whatever its colors/unique shape.
I attached my project in the previous message and I'm curious to see if you'd face the same problem. But I wouldn't like to infect you with my cr...p if this is due to some sort of virus affecting some service in Framworks, which is possible but I have no idea where to look.
Well following WBS00001's advice it works in a totally new file, it can recognize different glyphs and behave accordingly. So it must be the too many scripts running in my system that renders everything chaotic. I'm gonna have to simplify everything then.
Thanks everybody.
And, I must add : I'M SO GLAD THAT I WAS WRONG about EZB limitations!
I'm very glad to hear my little bit of advice was helpful. I have been right where you were, neck deep into what seemed like an overwhelming array of problems and things not working as they were supposed to, when someone gave me that advice. I've been using that technique ever since.
Best of luck on your docking project. And please continue keeping us informed of your progress (and difficulties).
And please continue keeping us informed of your progress (and difficulties).
Did it! My Robot now can find its way home across my apt. ! So excited!
Thanks to this great community. Thanks for your incredible patience Dj!
youtu.be/6r69ONP8yQQ
@elfege, Nice job! Having a robot auto dock for charging has come up a few times but this is the first example, I've seen, of one actually doing it.