
Asked
— Edited
How To Let Jd Turn Left Or Right
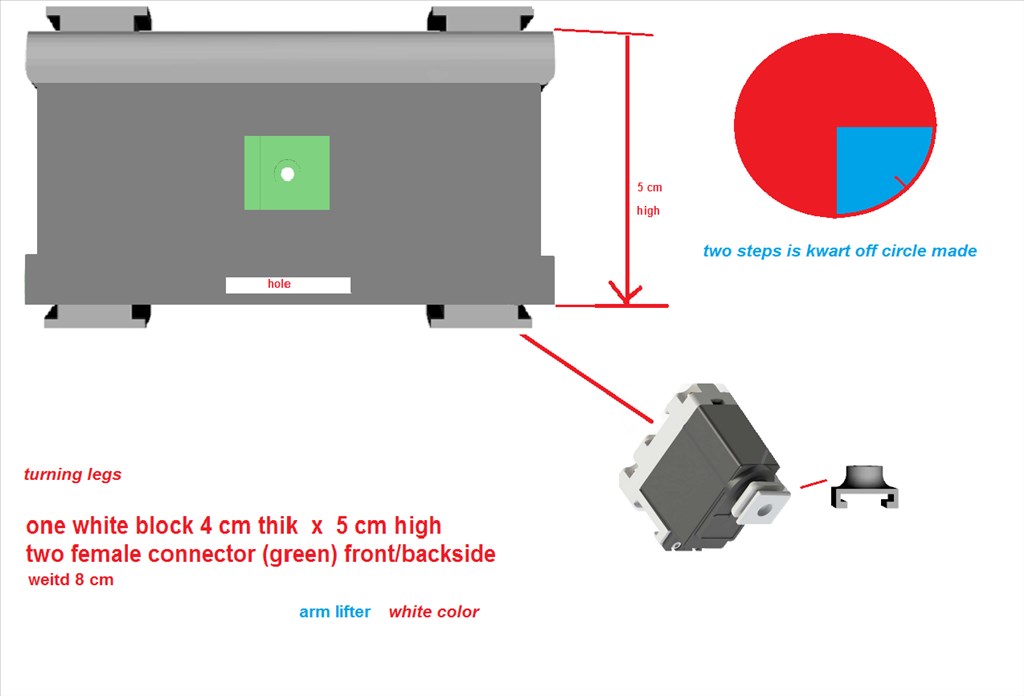
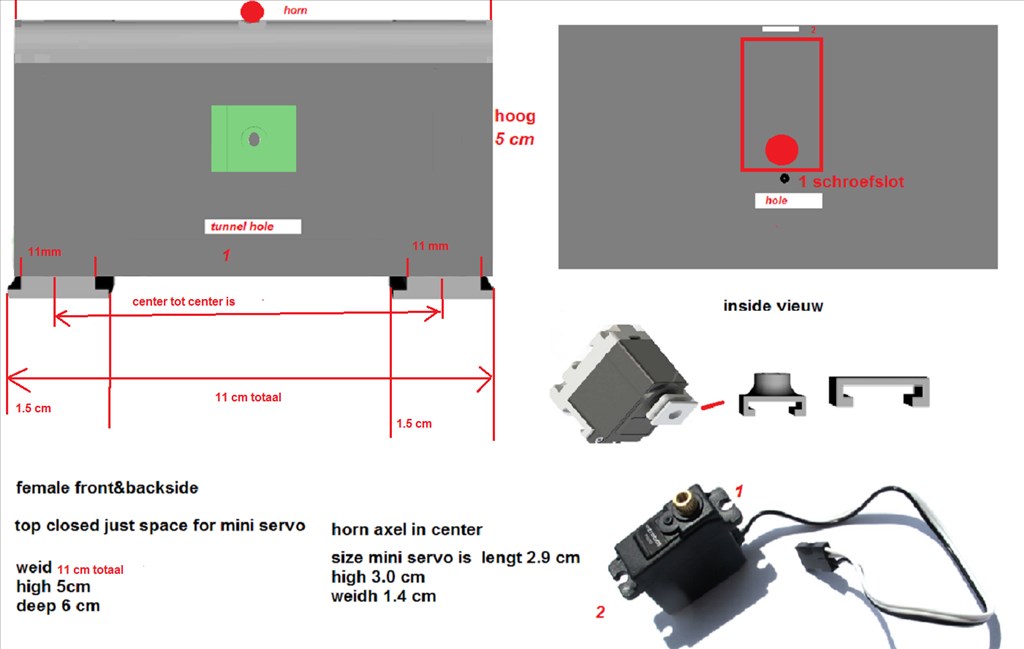
i notest that jd cant turn.so i start thinking whits i mostly do. what do you think off this 3d part.you can mount something in front and back,(rgb-sonar.) let him turn left or right,and he gets a little taler.i notest whit the exsperiment, that jf or another robot have a problem whit the hiel comming together. so maybe we can solve this by letting jd take little steps,2 to make a kwart off a circle.
what do you think.thank for reading.



JD can turn, he is just a little slow and/ir wide (need to have one leg step further than the other). I have seen him do it with my own wyes at the DC tech show I met DJ and company at.
That being said, with the right ez-bits, something like your idea, or just a servo as a swiveling hip joint could give him more mobility.
Alan
hi good to hear.i try it whit bioloid parts and still have a problem whit the hiel. and bioloid servo's are smaller .jd bracket is 6 cm.
whit swifel you mean some like in the video.?
JD turns. But it's a little slow. You can add more servos to his legs I'll let you expirement with new ways
I'll let you expirement with new ways
That's the fun of ezbits!
yes i find it very interesting why things are build as they are. for excample the diff when a horn is down or upwarts. i found out when putting the horn down,you get more space between the hiels.
love to see a video off jd when he turns,
thank you dj
I don't have a video handy, but this is an option to make him walk more "life like" with the ability to turn easier... you can get creative and try a few different ways
Here is a project file with the design: ModelTemplate-JDWithHips.EZB
i was thinking similar.i will give jd a waistblock and servo for turning waist.
and a bigger chest.in the end jd will have a big brother. thank you djps the link dont open
Since we are talking about turning....
Will the DC-ss503v still be the recommended compass?
i didn know there was a compass.do you have a link,and what does it do?