Asked
— Edited
How Can I Provide Continuous Power To Jd From An Ac Outlet Or Battery That Will
Hello Everyone,
I'm looking for a solution that will allow me to provide continuous power to JD with enough energy for the servos, camera and led lights to function properly while powered on for hours at a time.
Is it possible to buy a battery pack that will provide the following?:
- Fit inside the body same as the original battery pack does
- Provide me at-least a few hrs of life for JD
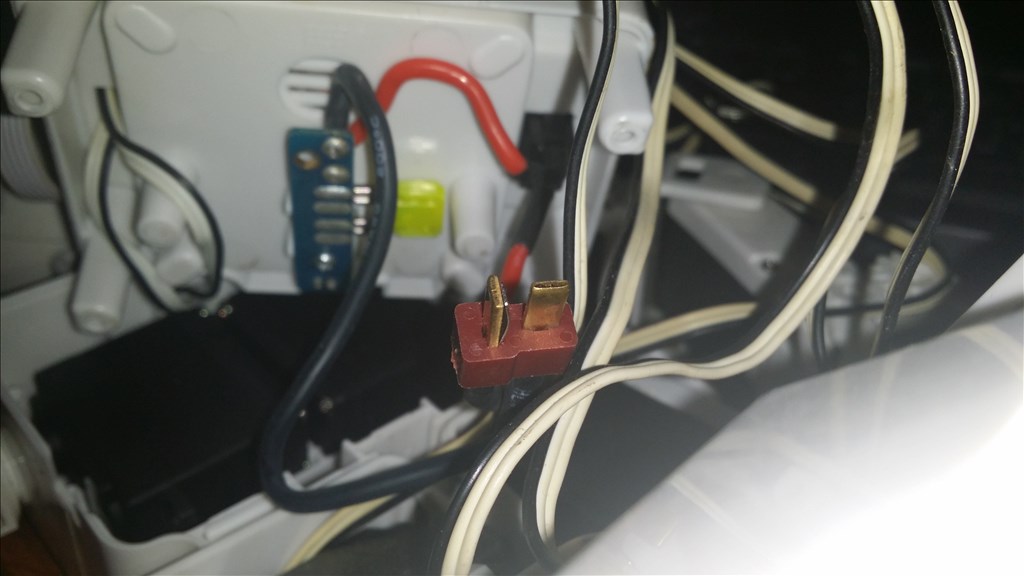
However, I think the ideal solution will be an AC to DC converter with the 7.47V - 22.2V that I can plug directly into into this connector:
I know this may be a very simple question for most people, but I have no experience with this kind of stuff :-) .
Any help is much appreciated...
Kind Regards, Richard

He's a power-hungry little droid, especially if the servos are running. The camera etc draw a lot less power.
You are looking at minutes of battery life with current battery tech, not hours.
You would need a much larger battery pack to provide hours of life, or something pretty exotic batterywise.
A direct line to a power supply would be more doable, but leaves him shackled to his base station.
@Wayward Mechanism Yes, I believe the direct line would be best. I'm ok with him having limited mobility, he will mainly use camera and arm servos with occasional leg servo movement.
Can you recommend something I can purchase to provide a direct line power source?
My robots (with the exception of my Roli) tend to be larger, and run on several linked SLA or Nicad Battery packs. The most power hungry ones only need to run for 5 minutes at a time, at most (combat robots) whereas the more peaceful ones can run for several hours on their batterypacks before needing recharging.
You could get a battery rated for high amp hours, and experiment.
I'm not sure what the maximum voltage and amperage the EZB4 can handle, but i suspect the answer would be in these forums somewhere. I know mine can handle 12 V just fine, and the servos JD uses aren't that current hungry compared to some things. Something like a marine SLA battery or maybe one or more Nicad packs from electric drills might be in order, or maybe there is a commercially available 12v power supply out there somewhere that will give you the hours you are after.
I'll have a think, and get back to you.
@Wayward Thanks, please also keep in mind that I am a newbie with all of this. I don't even know the name of this connector that the power source will have to fit into :-) .
@askwpcoach.
You will have a bit of a hard time finding a battery that will fit inside of JD that will give you more amp hours (more run time). But based in the dimensions given, this battery "should" fit inside JD and should nearly double his run time (depending on usage), but I can't confirm that it will fit correctly.
As you say you don't mind having the little guy tethered to a power cord, what you will need is a power supply than can output 7.4v to give JD the correct voltage for the servos.
But here's the important bit you need to know. The power supply will also need to supply at least 20 amps as well. Anything less than 20 amps, and the EZ-B in JD's back will either lock up (brown out) which will require you to turn the power off and on, or the servos simply won't move. When servos begin to move, they draw a lot of amps for a split second or so (in-rush current), and as JD has a fair few heavy duty servos, you will see why a 20 amp power supply is needed. You can also use a supply that outputs over 20 amps, as the EZ-B will only draw what it needs. If you read through previous posts about this, you will see new members using 2 amp "wall wart" supplies and can't figure out why their robot is not working.
So a 7.4 volt, 20 amp power supply is what you will need to have JD working at his best along with a female mini deans socket. This switching power supply is a good example of what you would need, although if you look around, you can find cheaper power supplies.
Or you could always buy a large battery pack and have it sit in the desk tethered to JD. A 7.4v 6500mah battery will give JD up to about 3.5 to 4 hours run time give or take (depending on how much the servos are used) and they only take a couple of hours to recharge with a good charger. Here is an example of a good 6500mah LiPo battery pack that will do the job.
I hope that info has given you food for thought and helped a bit.
Steve.
Along with what @Steve G said, I have found 5V 20A power supplies will also work. You'll just have to lower or disable the Battery monitor when running at 5V.
The plug end adapter to mate anything you get, battery or power supply, to the plug shown, may be available at a good Hobby Shop. Often they sell adapters to connect different batteries to the better battery chargers they sell. If your experience is limited you may want to try this rather than on line, or cutting and soldering. This way you can continue to use the existing wiring when you want to use JD normally.
If you plan on not running JD where he will be moving around, you could buy servo extension wires, relocate the EZB on an external power base, ( see the store on this site ) and easily use an external power supply which plugs in the wall. Online the wires are sold like 10 in a group and are cheap.
Good Luck
Ron R
There was a recent thread on this topic you might find helpful: https://synthiam.com/Community/Questions/8255
Whatever you do, you would need a plug and socket for delivering the external power that will disconnect the battery power as it connects the current from an external power supply. The safest choice is one which is called a break before make type. That means it would open the connection to the battery just before connecting the power from the external supply. Another variation would be to install a switch so as to be able to switch between the two sources. Again a break before make switch would be safest.
There is a variation which would use diodes to prevent battery-power supply interaction but you will loose about 7/10s of a volt that way. Not much but that means 7/10s of a volt from the battery as well and that is significant with this type battery.
Having said all that, however, it may be fine that the two supplies are joined for the brief time the external poser supply is plugged in, I'm not really certain. What I presented is simply the safest method. The basic fact is that the battery should be disconnected when the external supply is connected.
Finally, keep in mind that the wires coming from the external power supply should be at least as heavy duty as the wires coming from the battery to the robot. Depending on their length, perhaps even larger gauge (lower gauge number). Otherwise you can get a significant voltage drop when high current is demanded, even if the power supply can handle it fine. The servos will not appreciate that one bit.
The main problem with all that is the fact the body of the JD has no room to spare for anything. Perhaps you can add a small box to it somewhere.
I have emailed Anthony about coming up with a body that is longer to overcome this problem, even allowing for the battery to be easily switched out, and he says he will come up with something but I never hear back from him again on it. He is a busy man. It may be time to try again, however.