
DJ I hope you can help? I am experiencing major problems with the reliability of the serial link that concerns me a lot, as it stands the problem is bad enough to undermine all my work (over the last year) on utilizing the v4 for the ALTAIR robots.
The new ALTAIR heads have multiple PICs that all report back to a Master PIC which itself communicates with the v4. On testing I keep noticing the v4 drops out randomly and also breaks all serial comms at random times. In an attempt to discover the problem, I shut down all the interrupts buzzing around the PIC network, so that the Master was just (simply) communicating with the v4 with no external interrupts. I then ran some simple code that just sends 3 bytes to the v4 (every 100mS) then increments the bytes and so on. At the v4 end it just looks for the 3 bytes in the buffer reads them and increment a $times counter. What happens is that the v4 just breaks serial comms or has byte read errors at random times.
When the fault occurs serial comms completely stop and it is necessary to stop the script and start it again. I have found this happens when I put a static "3" in the UartAvailable line (for example if UartAvailable(0,0) = 3), but this should not be a problem as the v4 is only ever going to get an isolated packet of 3 bytes? To get around this if I change the static "3" to ">= 2" (for example if UartAvailable(0,0) >= 2) then the comms does not stop or error (so much), but of course this means that a packet misread has occurred and the buffer has accepted a 2 byte packet which means we have lost a byte.
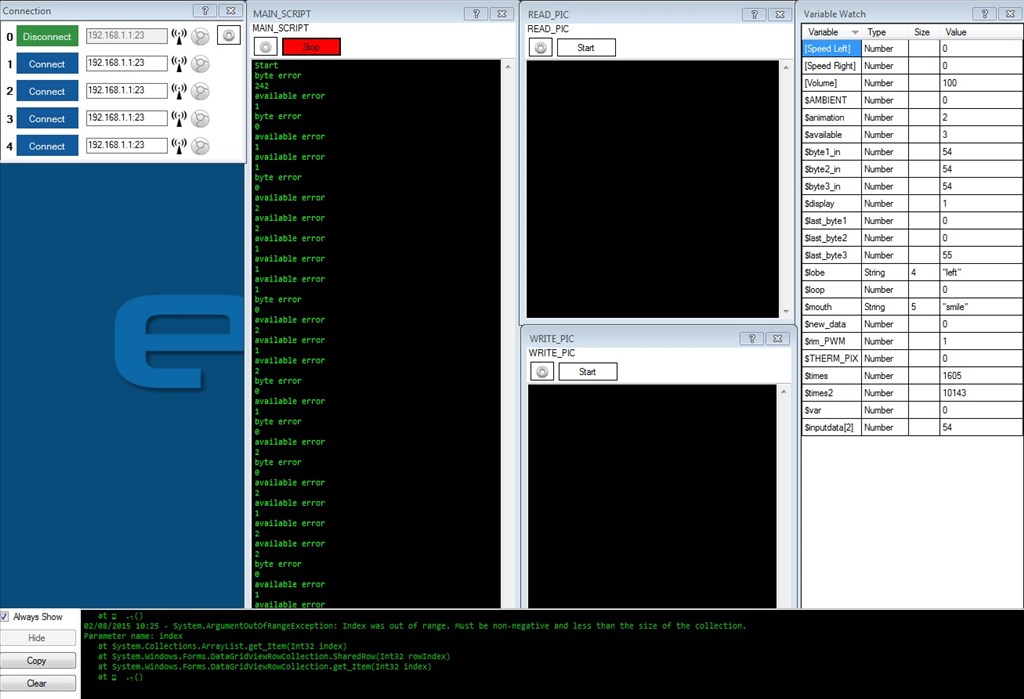
From my tests, in general it looks like the bytes available error occurs once in roughly 100 packet sends and a byte error (data byte read incorrectly) occurs around once every 250 packet sends. Below is a screen dump from one test which shows the errors from just over 1600 packet sends.
Unreliable serial is a major setback for me as all my robots use serial linked subsystem PIC modes so these dropouts where serial links can also just stop is a complete disaster for my robot designs!
Tony

Hey Tony,
About the "nag" email every day, I too have got those and found them annoying but my take on it was a little different, from my view it was likely implemented to encourage folks to check to see if they have a resolution, but it comes across as a little naggy. And I never viewed the threat to be banned as serious or even directed to me as I view myself as a good community member (well, at least borderline "OK", LOL), and viewed it as directed to those who would abuse the message boards.
But given yours and others feed back my hope is EZ-Robot will implement some verbiage changes to the notification and some logical rule changes and some more options to denote the state of a help request.
I'm glad you brought the topic up Tony, but my hope is that you don't leave the forum over it or take the notifications as personal. I think EZ-Robot staff have been good about making changes that user bring to their attention, I'm sure this will be improved as well.
Thanks Justin!
I was going to mention the same thing, the automated responses aren't directed at the people who are regularly engaged in the forum but rather those that come and go and sometimes forget to close their thread.
Tony,
I did some tests last night with an Arduino (which has an external crystal) with your code on the ARC side and found much the same results as you did. I figured I'd try to turn over a few stones to see if anything like an internal RC oscillator might be related but, nope, it wasn't. I will have to default to @DJ's response on this one as he has much more knowledgeable than I in this department.
I guess I should ask the question that hasn't been asked yet, what is your goal? Maybe we can find another route to achieve what you are going for. Are you looking for the fastest way to give real-time data from the sensors directly to the GUI? Could you possibly for-go the master-PIC and use UART0, 1, 2 from the ez-b directly to the slave PICs?
Hi Dj (and also Jeremie), thanks for the detailed response, it is appreciated, I had guessed this was the way that the v4 worked from my observations from the last week or so.
DJ, I did use your code extract and it helped a lot but did not fully stop the errors - it is the 100mS delay as you suggest "to be friendly to the communications channel" before looking again that is the killer, this is a huge amount of lost time for the tech that we use today.
For the record and to hopefully help others, here is my working solution that does not need such a long delay as gives a reliable data transfer:-
Master_PIC does its own work/processing which can be instantly paused by a high level interrupt from the v4 (on the serial line).
The v4 instigates a data transfer either by sending a dummy byte or a command packet, this causes the master_PIC to jump to the HP (high priority) interrupt routine - the master_PIC now reads in the byte or (genuine) command packet.
I found as DJ mentioned in his explanation, that the PIC response is too fast to straight away send back a data packet to the v4, so the PIC needs to wait around 10mS (in its Interrupt handler routine) and then send the packet to the v4 - it seems that any delay < 7mS brings back the errors again as DJ explained.
Using the above method, I just finished a test run of over 40,000 data transactions between the v4 and the master_PIC and only logged one error which I can live with.
Again thanks for your input.
Tony
Tony, what baud rate are you using? Consider the transfer time of your baud rate when pushing for a 10ms interval on the ez-b v4.
Also note that the word errors is incorrect. "Expecting" the packet to have been transferred before transmission has ended is not an error. Again, this is a logic challenge and once it's understood that the ez-b v4 and the other serial device have no way of synchronizing...
The only option to synchronize is to do this - and ensure you're using a very high baud rate of maybe 115k or higher if possible.
Hi DJ, Thanks for the further script - as I said in my post #20 I have already found a method for reliable data transfer to the v4 using a similar synchronize to your suggestion (sort of handshake) that I explained in the post. it is all working ok now.
The baud rate I am using is 19200, so the 3 byte packet takes under 2 milliseconds to transmit.
You are correct "expecting" is a better term for the event, I now understand how the v4 operates thanks to your guidance.
Tony
Awesome Tony - glad it's working out! With the next update of ARC, you can create controls specific for your robot, with branding, etc...
Looking forward to that!