
srobert
Canada
Asked
— Edited
Fine Tuning V-Ports
Hi,
I'm really enjoying using an EZB-v4 to control my Humanoid. I had to switch to a SSC-32 to run the servos (due to amperage limitations of using 20 high torque servos) and communicating via uart has been a breeze. All auto-position functions are working but I am unable to fine tune my servos (that are assigned to v-ports). Am I missing something? I have a few light servos (head/wrists) plugged into the EZB directly and can fine tune those. But I when trying to fine tune the servos in the V-ports they do not turn.
When I hit the configure button all servos turn to "init" position and I have saved the configuration. I've also added details to all virtual ports.
Any help would be greatly appreciated.
Thanks.

There's two terminologies used in the question, fine tuning and autoposition.
Which of the two are you inquiring about?
fine tune is an offset given to each servo individually to correct the 90 degree angle. This feature is accessed by the top ribbon menu bar under project.
auto position is a control for creating gait movement sequences. This feature is added to your project with Add Control and configured pressing the gear icon.
Hi DJ, Thanks for the quick reply. Sorry if the question was unclear. The Auto Position work's perfectly.
The issue appears when I hit the configure button. All servos turn to "init" position (as expected), but the V-ports do not update (turn) when I try to adjust the offset position.
No prob, we'll get to the bottom of this. I am still unsure what control or feature we're discussing. Which one of these two configure buttons are you referring to...
The Configure button on the Auto Position Control, highlighted in yellow?
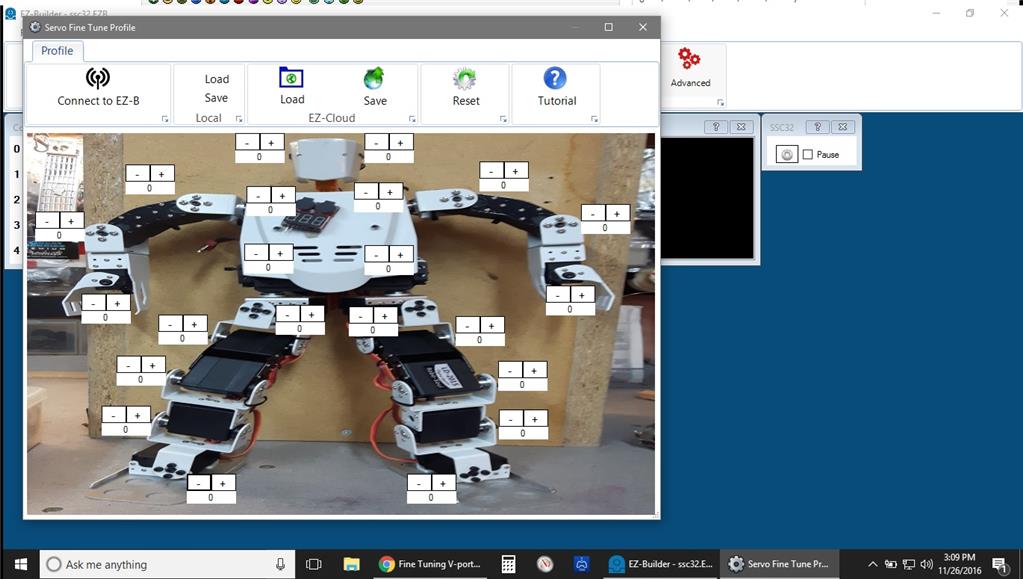
The Configure button on the servo Profile menu, highlighted in yellow?
Talking about the configure in the servo profile menu. I want to fine tune the initial position of the servos plugged into the ssc32.
The SSC-32 and servo plugins may or may not use the fine tune value. In this case, the SSC-32 does not use the fine tune value. Use the Auto Position control to create frames for your specific robot build.
The Fine Tune values were designed for robots that can be reproduced by others using EZ-Bits, which are universal connectors.
I'll take a peek at the code to see how much work it would be to implement and if it's worth while. In the meantime, the Auto Position control is best suited for your needs because each custom frame can be modified for desired positions.
Actually the code change was quite simple. Expect it in the next release...
That's great news. And may I say: Your EZB software and hardware is by far the best, most intuitive and easy to learn robotics platform I've ever come across. Keep up the great work. (The fact that it's all Canadian make's it even better in my opinion)
Thanks for the kind words Glad the platform is working for you!
Glad the platform is working for you!