Zxen
Australia
Asked
— Edited
Ezbv4 Modifications
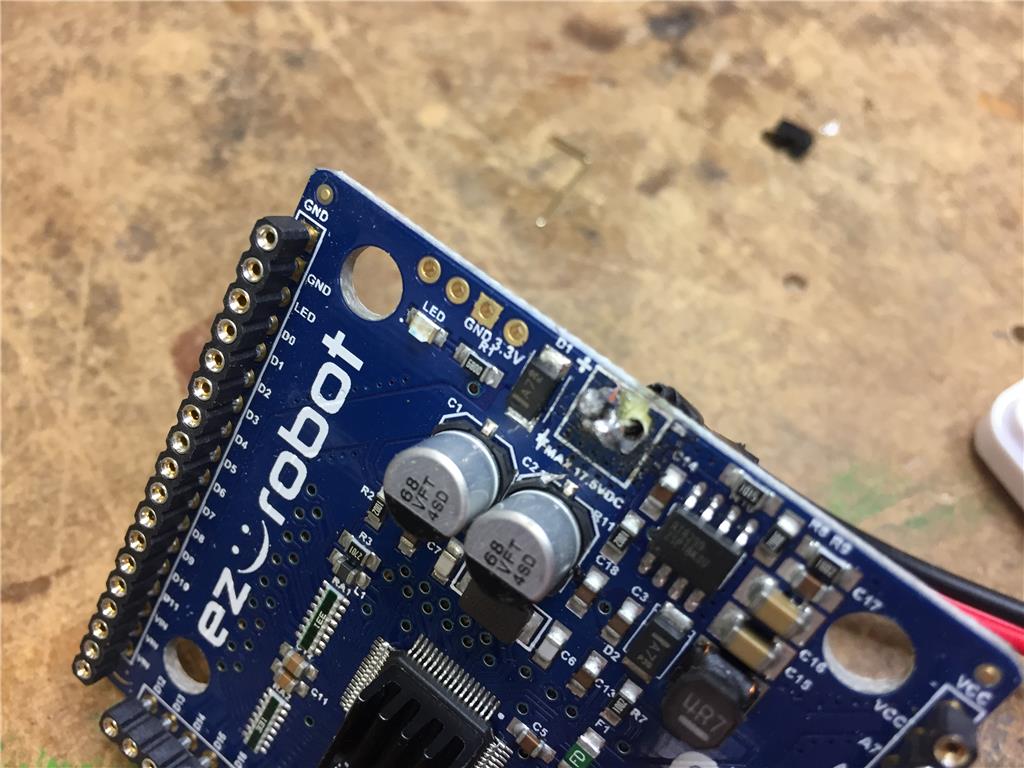
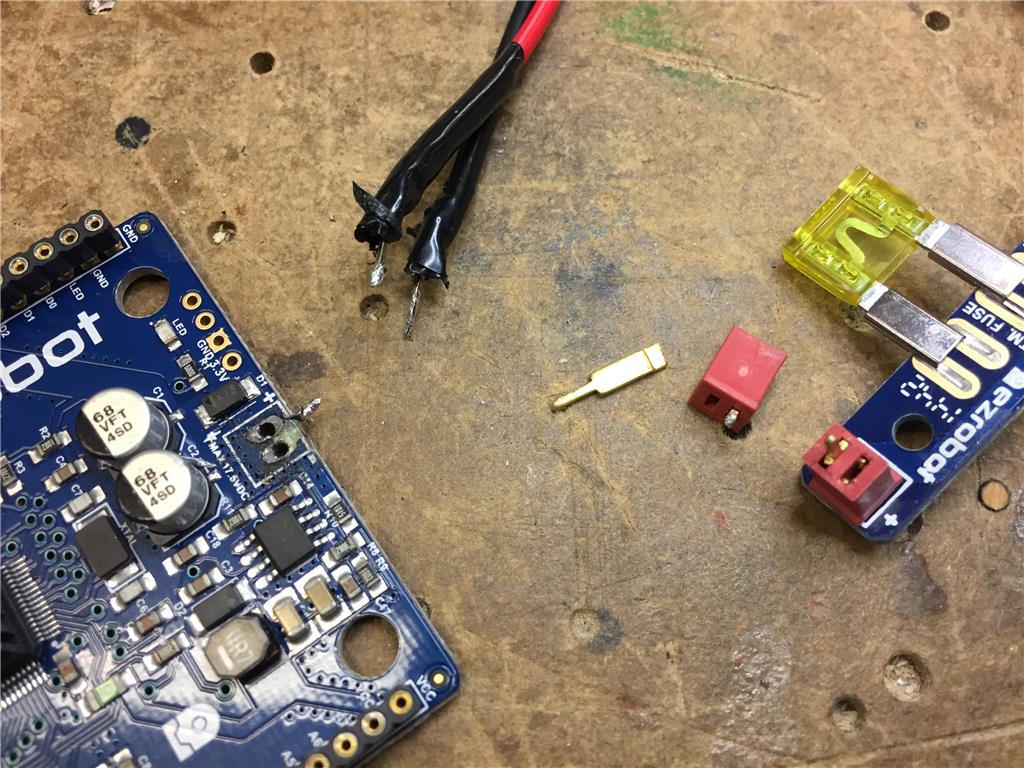
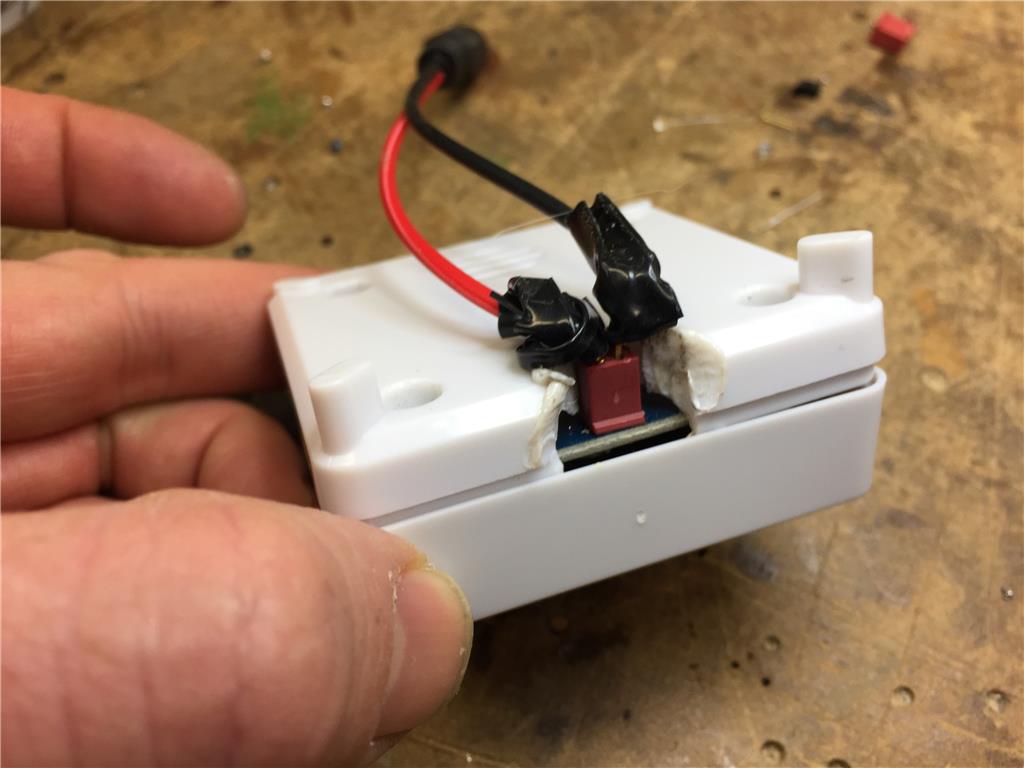
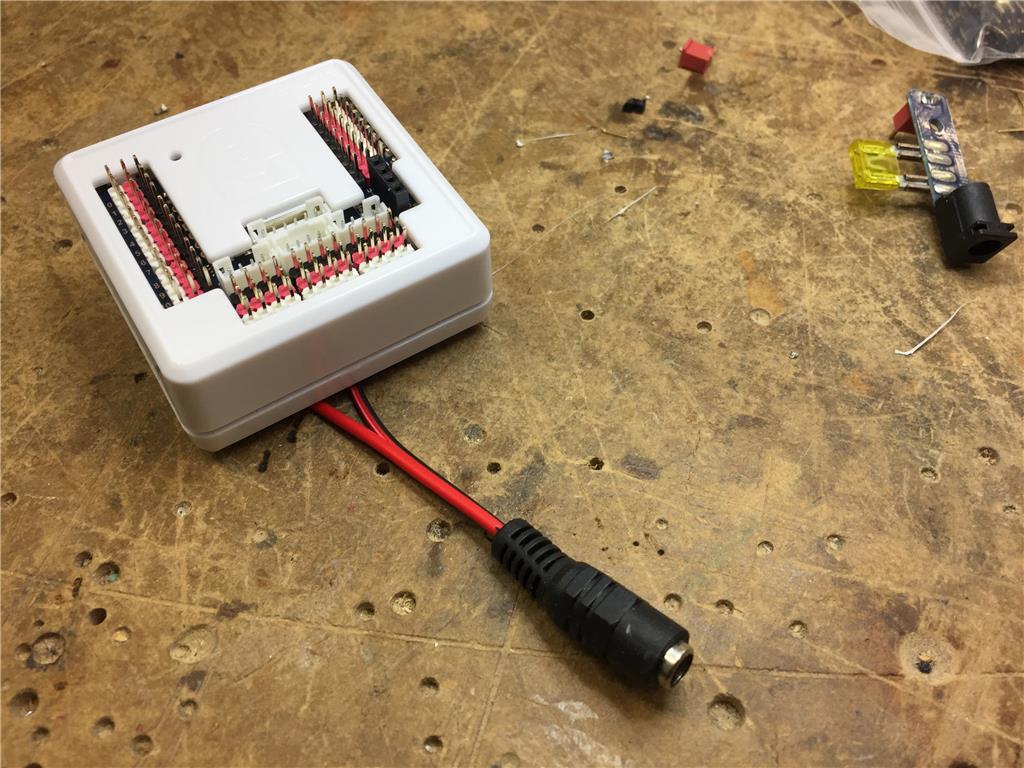
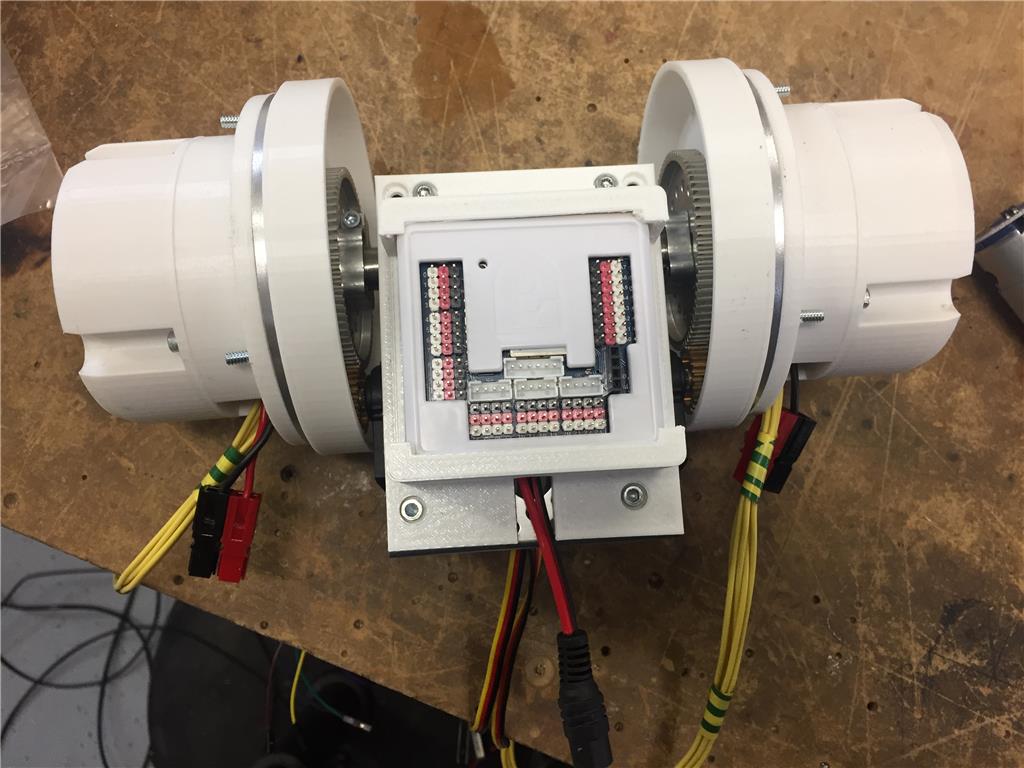
I have needed to reduce the size of my EZB because it did not fit nicely in my robot. So I removed the power base. Unfortunately, desoldering the power terminals from the EZB wasn't pretty - I'm not good at it. It destroyed the board. Luckily I have a second board and decided to keep the terminal, bend the male pin, shove a second pin in and attach a connector. No more 20A fuse but I power my servos separately anyway.
Now I want a speaker output and the ability to attach the EZB directly to a computer without WiFi lag. Its causing issues and not often available in Australia.

Have you looked into using IoTiny?
Speaker breakouts here: https://synthiam.com/Tutorials/UserTutorials/controlId/199
faengelm, I need all the servo inputs. Thanks DJ Sures.
I hope you don't take offence to this but, Ouch. That's an ugly modification. I totally understand the difficulty of properly soldering and unsoldering on any board. Believe me, I've destroyed my share of solder pads and traces. I did this power mod on a few of my EZB's and also destroyed a solder pad or two. I had to properly repair the pads before I continued so it would be safe.
I know you are planning on selling this to department stores to display fashion. Is this model just your personal prototype? If so then this mod may be no big deal as long as it's safely done under that tape job. If you are you planning on personally building more of these to customers for a display mannequin perhaps you should either learn how to desolder and solder or subcontract this task out.
Also If you don't want to solder there are much better ways to connect power to the EZB. Instead of just bending one pin and shoving in another one, you can get the proper connectors and a tool and make a decent adaptor. You can even buy an already manufactured adaptor. Heck, you've already spent all this money on servos and hardware making a state of the art robot manakin. Don't skimp on the power delivery system. It not only looks cheesy but it's a dangerous hazard that could burn down your home or your customer's business and kill someone. eek Also don't leave out a main fuse.
@Zxen Have you looked into a micro Deans adapter?
www.amazon.com/dp/B001BHLWI0/ref=cm_sw_r_em_tai_c_t3auzb246FHJX
If that protrudes too far, there are other micro Means adapter that have wires attached which make it much easier to solder than on those small pins
Regards, Frank
@Zxen I agree with Dave... I assume this is just a prototype? Because I don't think should not be sold or even given to any customer the way it sits... You are going to have to "up your game" and make it much more professional (and much safer too)...
@Zxen Have you tried just plugging in the micro Deans connector assembly that's in the $9.99 USD Power Shell?
That would also give you a LiPo Battery Harness compatible barrel jack connector on the other end
It also has a safety fuse in case of shorts
Regards, Frank
Of course I'm not going to sell a product like this, guys, but thanks for all the insults. Your mothers would be proud. I had already said I did a bad job. I've fallen in the mud and you guys tell me I'm clumsy. I don't think the power base is a reasonable part of the EZB, and by the time I need to release this, if its ever finished, I hope EZB power bases will be part of the board (EZBv5?). Thanks for the suggestions on chunky and moderately chunky solutions. It would be great if someone who is good at doing this showed the instructions on video - I think everyone would prefer not to have the power base (although I'm sure most people want a fuse).