
Asked
— Edited
Ezb4- How To Extend The Servo Ports
Hi DJ,
Would you help to answer my question as below :
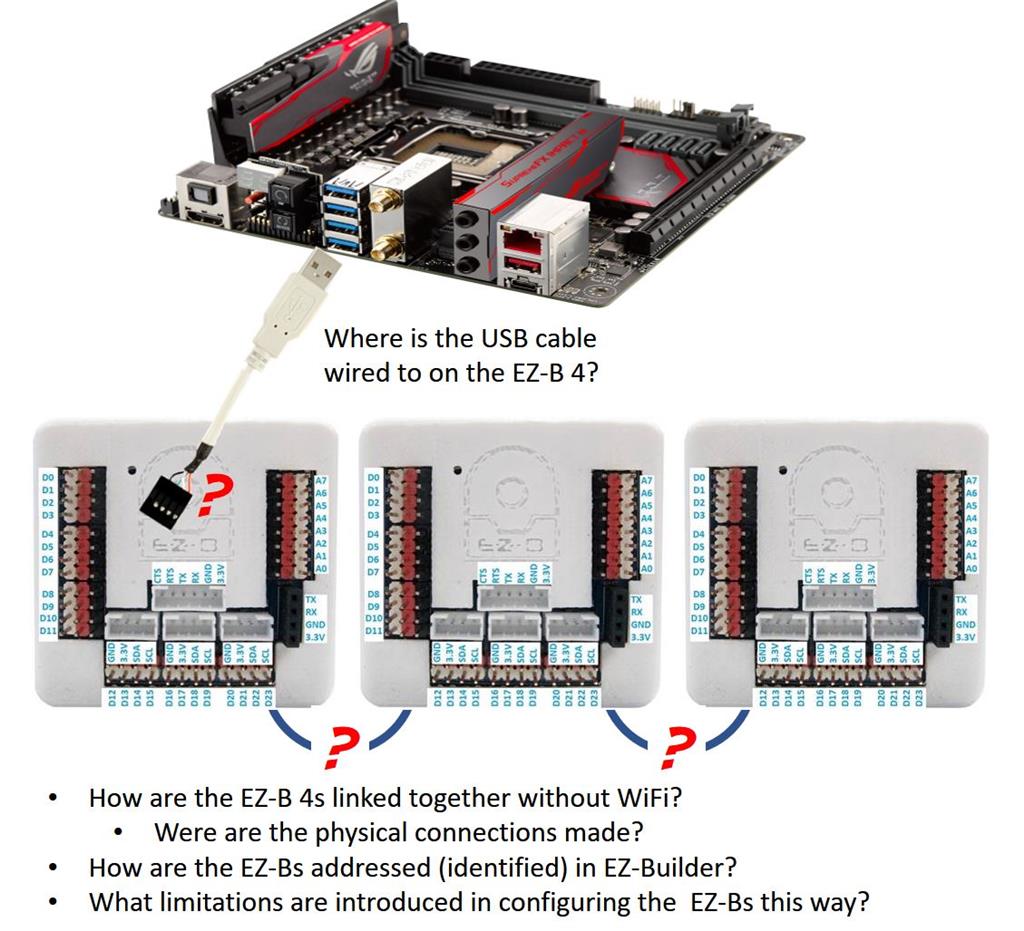
I'm making a robotic but it has over 23 servo ports. Is it need to buy one more EZB4 to extend the servo ports? if yes, how to connect and let the ARC to know the extend servo ports?
EZB4 can support the heavy duty servo (VDC 12V)?
Will it reduce the power if servo ports are full ?
Thanks for your attention.
Ricky Ma

@Ricky.
To move a servo with multiple boards, in the servo controls, you can choose what board the servos are connected to. If you want to write scripts to move servos, this is how you would do it...
The "1." in the second script is the number of the board the servo is connected to. The same can also be done with servo speeds. if you click here, you can read a thread I started about using multiple EZ-B's.
You can use pretty much any servo with the EZ-B, so heavy duty servos will be fine. Providing you are using an adequate power source to power your 12v servos with correct voltage, and more importantly amps, it won't be a problem, but obviously 12v servos will use more power that a 7v servo. Click here to read a recent discussion about using adequate power supplies.
To your last question about the EZ-B full for servos, this would depend on how many servos would be moving at the same time. Members have had 24 7v EZ-Robot servos connected to one board and have had no problems. However having 24 heavy duty 12v servos moving all at once, I'm not sure about. If the servo inrush current (when a servo begins to move) is too great, it could trip the poly fuse in the EZ-B. Moving one or a few servos that you mentioned at the same time should not be a problem.
You could also use an SSC-32 board to add up to 32 additional servos to your EZ-B. See https://synthiam.com/Tutorials/Help.aspx?id=216
Alan
Good point Alan. That one did slip my mind, and actually goes to answering a question I had recently about servo drivers.
Thanks.
@Alan.
I just had a look at the SSC-32 servo board and it looks like it's been discontinued and replaced with the SSC-32 USB servo controller. I take it this works the same way as the old one using the UART connection?
The SSC-32 USB board works fabulous with the ezb... I have been using them with my inMoovs... As Alan mentioned there is support (ssc-32 control) already built into ARC for them... You access the 32 servo ports on the ssc-32 using the virtual ports in the autopositioner...
There is also a tutorial I wrote floating around here on how to drive the ssc-32 from a script as well....
@Richard.
Excellent stuff. Ordering one now. Thanks for confirming.
@Ricky.
Credit goes to Alan on this. His solution is simple to set up, connects straight to the EZ-B which frees up a lot of your digital ports, and is also a cheaper solution.
HI Steve G, Alan & Richard R,
Thanks everyone for your suggestion & information! I will buy one more SSC-32U USB servo Controller & EZB4 for my robotics!
:)
Would I know that how to connect the Hardware SSC-32U USB servo Controller to EZB?