
hoolagen1
USA
Asked
Ezb V3 Software For Windows 10?
Anyone have a link for ezb v3 software that will run on windows 10?
Related Hardware (view all EZB hardware)
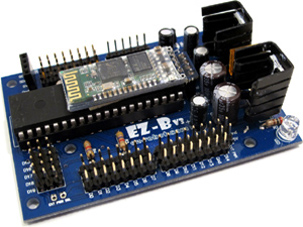
EZ-B V3
by EZ-Robot
EZ-B v3 Bluetooth robot controller supported by Synthiam ARC - features, specs and legacy connection tutorial
Bluetooth
Servos
24
Camera
Audio
UART
✕
I2C
ADC
8
Digital
24

Success!!
thank you!!
more pics to follow!
Good morning all!
I'm able to connect the v3 to the ezb software. Thanks for this!!
I'm running into another issue. When I try to connect a servo, horizontal or vertical or even a movement control, the servo isn't recognized.
The image that comes up when selecting a port is a v4 not a v3. So I'm assuming the ports aren't "lining up" as there are different number of ports. Is there any way to select a v3 instead of a V4 when selecting a servo port?
I have done a lot of reading on this. I just cant find anything.
Thanks in advance.
Port D0 on a v3 is port D0 on a v3 is port D0 on an arduino is port D0
Port d0 is port d0 on all devices
Port d1 is port d1 on all devices
Please do not dismiss the log file that is popping up on your computer. There is an error explaining the problem... How are you powering the v3? It needs more amps for your servos - because it's rebooting it seems.. oops!
Oh geez!!!
I went straight to the tutorials and just started reading.
The whole time the log is telling me it's my battery!
D'oh!!
I'm using a 7.2v 2200mah ni-MH battery pack. I have a 12v battery I'll try shortly.
Nope actually my other battery is a 7.2v 3000mah ni-MH too. So....what voltage do I need?
That should be enough but the v3 has an onboard voltage regulator - and that doesn’t like too many servos.
Try it with only one servo connected to the v3 and no other peripherals
Try this new beta: https://synthiam.com/Products/Releases/Beta-Release-2020-01-12-00-19000
I noticed the i2c set speed capability on the v3 was being set. That might help actually
Will do!
I'm charging the batteries now. I'll post updates as soon as they've charged.
Thank you again for your time and help.