
sereandrei
Romania
Asked
— Edited
Hy all,
I am Andrew from Romania , i have a ez-robot platform and a Zumo Robot from Polulu. The Zumo robot came with a H-bridge - DRV8835.
I dont know how to set it up. I know how to connect the motors, but i dont know how to set it up in ARC . Excuse my english. h-bridge from Polulu

@Josh, the VCC and VM shouldn't be the same wire. VMM is an output.
Mode wants to be low, so grounded or disconnected.
VIN is mentioned, 2-11 V motor power supply connection. Operation at low VIN voltages slightly reduces the maximum current output.
VMM is a power supply to other components with reverse voltage protection. It's not needed in this case.
I have edited my post to suit
Actually I've started to doubt myself on this one... Will have another look over it in a second.
The way I see it is if you don't have voltage to VMM its not going to do anything.
VMM has nothing connected.
The datasheet states;
Which is why I said it is an output.
The motor gets it's power through VIN The logic gets it's power through VCC
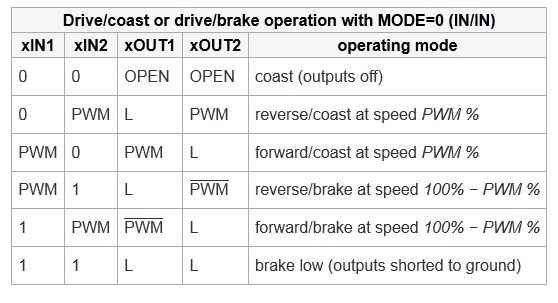
This truth table shows how to supply the board with the GPIO/Digital highs and lows for operation.So basically, if set up as my earlier post, with D15 & D16 both high it will brake on motor b. If D15 is high it will move motor B forwards and if D16 is high it will move in reverse.
Hy all,
Thanks for all the reply , i was amaze when i saw all the activity on this thread!
First of all thanks Rich, now i can move the zumo robot with my ez-b. I have connected the ez-b to the zumo as following:
D15 -> BIN2 D16 -> BIN1 D17 -> AIN2 D18 -> AIN1
Ground from D15 to GND VCC from D15 to VCC
Now in the ARC i have chose a 4 wire HBridge Movement Panel and make the following settings : Left Trigger A -> D17 Left Trigger B -> D16 Right Trigger A -> D18 Right Trigger B -> D15
Now i have forward , left and right , but no reverse , i still need to play with the pin arrangement.
Thanks all for the fast reply !
This is the robot
Wow that little guy is fast! Are you going to sumo robot wrestle? Sorry Rich heck I guess I missed that in the PDF I read. But I'm glad you was able to figure it out quick.
Hy jstarne1,
The motors on the zumo robot are 1:100 , they have speed but don`t have power. It is just fast .
.
I will try to find out how to revers the little guy!
Thanks again all for all the help !
Reverse should be high on both AIN2 and BIN2, however if you have forward, left & right working it makes me wonder if there's something strange that needs to happen too.
When turning left & right does one wheel reverse and one go forward or does one only go forward? Reverse may need PWM on AIN1 and BIN1 or something...
P.S. That's one quick little dude
So when i pres the FW - both of the motors are spinning in the same direction , for left - only the left motors spins , for the right - only the right motors spins. They are not turning in different directions when turning left or right.
I saw the options on the H-bridge for the PWM signal but don`t know how to set it up in the EZ-B?
Thanks all!