tklass
Canada
Asked
— Edited
Ez-B With Sabertooth Motor Controller
Hi there, I just got my EZ-b and I am trying to make it work with this https://www.robotshop.com/ca/productinfo.aspx?pc=RB-Dim-30&lang=en-US
I have the motors driving using a regular hobby radio receiver and transmitter plugged into the servo board.
I have tried the Movement Panel connecting it to d0 and I can only get the motors to twitch
any ideas?

Press the ? button on the Sabertooth Motor Control and view the help tutorial. Consult the manual for your sabertooth to ensure the settings match the tutorial
would that be the sabertooth serial control under the H bridge?
I set the jumpers on the board the way in which it describes on the image and as soon as I connect the S1 connector to EZ-B the wheels start spinning randmonly
I originally thought I could just use it as described here EZ-Robot suggests connect Sabertooth Motor Controllers in R/C mode. This allows the user to control the motor speed and direction with the Modified servo Movement Panel.
But nothing happens when connected to the EZ-B
I have ver 1.03 of the sabertooth maybe that's not compatible with EZB?
lol Follow these steps please:
Follow these steps please:
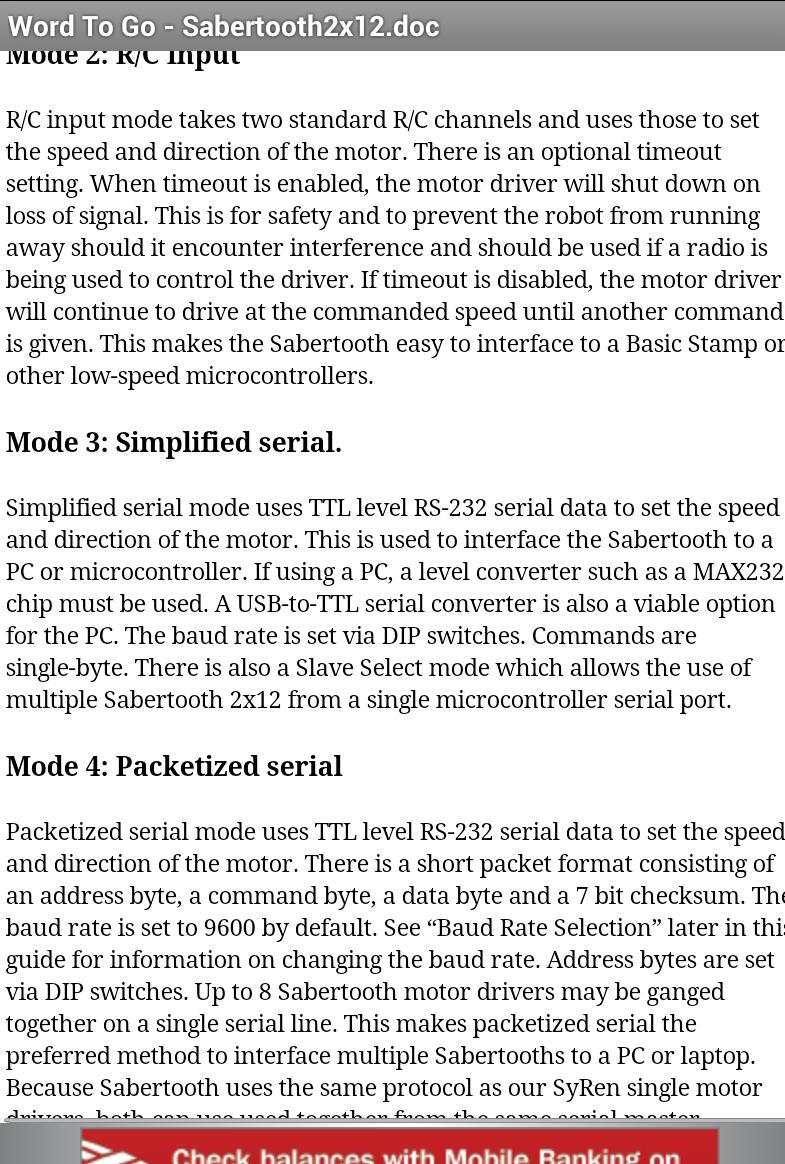
Do not bother using the servo control with the sabertooth - they don't have a super reliable pwm monitor. Use the serial version. Ensure you have followed the manual for the Sabertooth to put it into Serial mode at the specified BAUD rate of the tutorial.
thanks this is the manual I have does not mention serial mode would you be able to look at the link and let me know if any of these jumper settings would work there are only a few https://www.dimensionengineering.com/datasheets/Sabertooth2x10RC.pdf
I found the settings and they are set correctly setup. The servo pad control makes the motors work correctly however that's the only control I have been able to make work
It doesn't look like your motor driver supports serial mode - if that is the correct manual.
So, you will have to resort to servo mode. Due to that, I do not have any configuration values to suggest. You will need to expirement with the Modified servo Movement Panel to determine what values to use.
You can use a "Vertical Servo" control at first. Move it slowly and write down the values of the speeds you wish. Use those values in the Modified servo Movement Panel.
I cannot suggest what dip switch setting to use because I have no experience with that Sabertooth. If you need additional support, I would recommend contacting the manufacturer.