
Rhyana
Ez-B Communication Error - Flaky Connection?
Product - Revolution:SIX
Product is in brand new condition. We took the plastic off the box this morning (it was supposed to be a Christmas gift for our son). We read through the online getting-started tutorial(s) and are now trying to setup the robot.
When we we turn on the power the servo motors twitch, as expected, but the EZ-B says "communication error" repeatedly.
When I apply downward pressure to the EZ-B I hear a start-up chime, and a blue light begins to flash. Then I can see the EZ-B WIFI connection from my computer and connect to it. I can correctly connect to the EZ-B from the builder software.
However, as soon as I release the downward pressure on the EZ-B the wifi connection disappears.
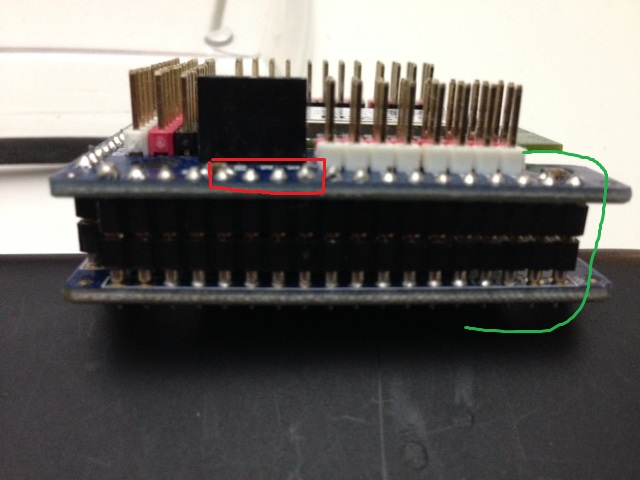
The EZ-B seems quite loose in the base plate. I can rotate it horizontally by a small amount, it's definitely not snug. Is this a QC issue? Again, product is in new condition. Two adults attempted to assemble this. Nothing was dropped or treated roughly.
Rhyan

See this tutorial on tightening the power connection.
https://synthiam.com/Tutorials/Lesson/45?courseId=2
Alan
Yes, I should have mentioned that we did already try this, and it did temporarily help the issue (for about 1 hour we were able to get a wifi connection without constant pressure).
Now we're back to the original problem where constant downward pressure is required to make a wifi connection.
We haven't tried any other troubleshooting procedures.
Rhyan
It helps if you mark the tutorials as complete when you take them. I checked your profile before posting the link to see if you had seen it.
Still sounds like a connection issue, although I suppose it could be an internal connection. Does it matter where you press? ie, if you press directly over the power connector is it more consistent then pressing in another spot? You could try gently jiggling the power connector where it comes through the EZ-B case to see if it is loose on the board, or if it is really just having a problem getting the pins to hold. Same for the connector in the SIX body. The connector should not move inside the body.
Alan
Thanks, we'll mark the tutorials as complete from now on.
Pressure directly over the connector or in the center of the EZ-B seems to work the best (I don't notice any difference between those two spots). Pressure over the corners doesn't work.
The connector in the SIX body feels loose to me, or at least more loose than the connector on the EZ-B. I can get it to noticeably wiggle with gentle pressure.
Rhyan
I am unsure what the other thread says, but try cleaning the power connectors with alcohol. Then try bending the pins/tabs on the female parts of the mini deans connector inwards, in order to get a better pinch of the pins. If it is all revolving around the power connector(mini deans on bottom of ez-b pcb) then the only other option then would be to inspect and look for bad solder joints, and the connector being loose on the board.
It should barely move, and should spring back to position if you do push it. If it is freely wiggling around, or up and down, I think it may be loose inside the body.
I am going to open up my adventure bot to see how it is attached before providing additional advice. This might be an easy fix with some glue or a screwdriver, or may be a warranty issue (I hope not, but EZ-Robot is really good about dealing with warranty returns if needed).
Alan
OK. Body open now. The connector is on the end of a small circuit board that just sits on a plastic peg and a little support in the center. The top of the body then presses down and holds it in place.
I would check to see if the 4 screws that hold the body together are all tight. If the top and bottom are not tight, the connector can move around. If they are tight, you could try opening the body and adding a bit of hot glue under the board to hold it in place better (and also inspect for any cracks in the support). You can also check that the fuse is tightly inserted, although I doubt that would be the issue because it would not respond to pressure from the top.
Note: you do not need to open the battery compartment when you open the body, and if you are careful you should be able to do it without removing the legs from the body.
If everything seems right inside, I would try again with tightening the connector pins as in the tutorial I liked to, and if they won't hold it tight, reach out to EZ Robot support through the Contact Us link (Likely someone will see this post and have other ideas to try before dealing with warranty).
Alan
Thanks for the help, Alan. We'll give your suggestions a try tomorrow and update the thread.
Rhyan