
tctctc
Russia
Asked
— Edited

Error Connecting To Spy-C Tank
When I click on "Connect" button the tank makes a brief initialization noise with its camera motor and then I see an error message in ARC:
Rover Error: System.IO.IOException: Unable to read data from the transport connection: Ein Verbindungsversuch ist fehlgeschlagen, da die Gegenstelle nach einer bestimmten Zeitspanne nicht richtig reagiert hat, oder die hergestellte Verbindung war fehlerhaft, da der verbundene Host nicht reagiert hat. ---> System.Net.Sockets.SocketException: Ein Verbindungsversuch ist fehlgeschlagen, da die Gegenstelle nach einer bestimmten Zeitspanne nicht richtig reagiert hat, oder die hergestellte Verbindung war fehlerhaft, da der verbundene Host nicht reagiert hat
at System.Net.Sockets.Socket.Receive(Byte[] buffer, Int32 offset, Int32 size, SocketFlags socketFlags)
at System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size)
--- End of inner exception stack trace ---
at System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size)
at System.IO.Stream.ReadByte()
at EZ_B.BrookstoneRover.Connect()
I am using ARC version 2013.12.02.00.
If you neet some extra information please teach me how to get it from the rover.
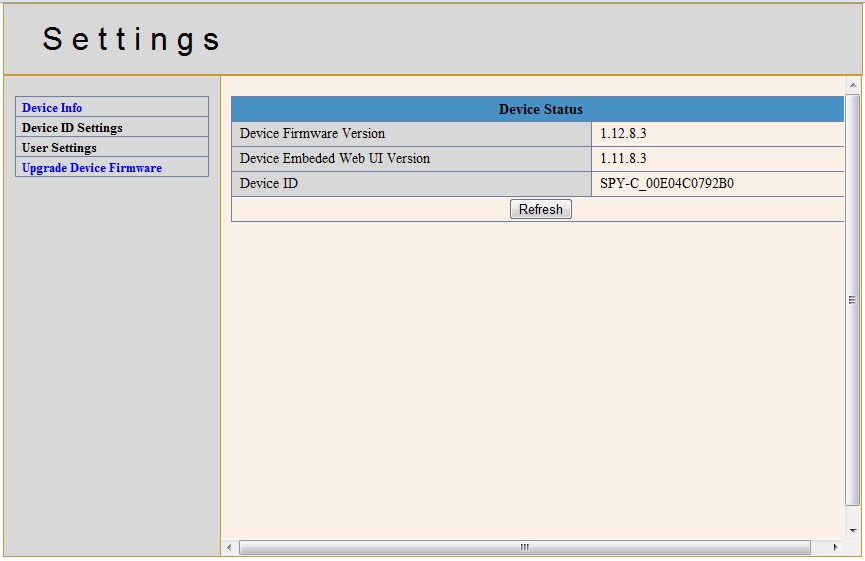
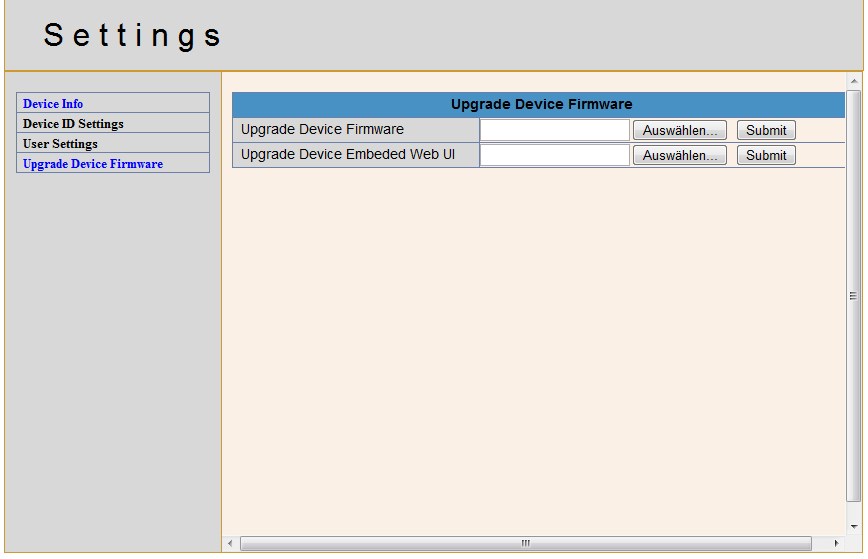
I can access tank's web interface using https://192.168.1.100/ address and am able to log in with AC13/AC13 credentials, but can't do anything else because this interface offers read-only capabilities.
Scanning tank's ports brought me nothing.

jstarne1
The SDK gives you access to ARC controls and functionality within C# or VB.Net. It doesn't really provide for the ability to modify that functionality.
If you are going to be writing a C# or VB.Net application, there are probably already controls available for the Spy-C tank or other Brookstone Rover variants, or you can use raw TCP/IP if the communication protocol is documented or can be reverse engineered (the OP said he was using Wireshark, which is a tool for examining TCP/IP packets. If he figures out the packets, the TCP/IP controls in C# or VB.NET can reproduce them).
Where the SDK would help is if you want to add an EZ-B to the tank for controlling additional attached devices (servos, additional cameras, ping sensors, etc...
Alan
Hi,
what is the current state on this matter? I have been trying to do the same, and it seems that the Spy-C is really almost the same as the Brookstone Rover. Any ideas on how to make this work?
Thanks!
L
Not trying to be a downer here, but yeah it's probably not going to happen.... Maybe it looks like the Brookstone rover, but electronics and control could be completely different.... I am sure DJ would love to, but EZ Robot has their own line of robots now and I am sure there are more to come... I am not speaking for EZ Robot, but I am sure their efforts need to be dedicated to their own robots in order to generate revenue... Supporting 3rd party robots was done out of the kindness of DJ's heart, but unfortunately with ARC being free software and not selling any of these 3rd party robots wasn't/isn't making ez robot any money... Again, I am not speaking for ez robot, just my opinion for whatever it's worth...
Sad. I think the electronics is the same. I checked mine and compared to the internals of the Rover and they are all the same: A Loftek IP cam. Essentially is the same hardware which is bought and rebranded by different companies. You can read more about this in this thread:
https://www.openipcam.com/forum/index.php/topic,261.0.html?PHPSESSID=f4o6srdd0c7h48co5lf0c0snd6
Isn't there any plans to open source EZRobot?. That would make it really free, and not only gratis as it is now.
Cheers.
Honestly why don't you just gut this things electronics and put a ezb and ez camera in it and call it a day. Use the existing motors and a small H bridge. That's really the simplest answer.
As it turns out, this robot is compatible with the Rover 2.0 and not the 1.0. The 2.0 is not supported by EZRobot, so for the time being, if you want to control this you should look else where. This for example looks quite interesting: https://github.com/wearefractal/rover which currently seems to me as the simplest answer. Is there any hope of support for the Rover 2.0 in EZ Robot?
Cheers,
L.
So, after trying stuff for a while, I found this project: https://home.wlu.edu/~levys/software/roverpylot/ which is a python API to control the rover 2.0. After some hacking around I managed to fork a version of that, which can control the Spy-C. You can find my forked repo here: https://github.com/ramirez/RoverPylot .
Hope this helps, although the thread seems to be quite old.
Cheers,
L.
Support for the Rover 2 is on the list of items to complete. However, it's a free feature of our software and therefore not a high priority. I do not have a timeframe for when 2.0 support will be completed... but it will most likely be in the new year