
tctctc
Russia
Asked
— Edited

Error Connecting To Spy-C Tank
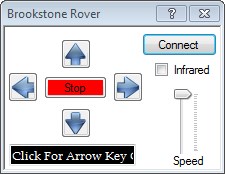
When I click on "Connect" button the tank makes a brief initialization noise with its camera motor and then I see an error message in ARC:
Rover Error: System.IO.IOException: Unable to read data from the transport connection: Ein Verbindungsversuch ist fehlgeschlagen, da die Gegenstelle nach einer bestimmten Zeitspanne nicht richtig reagiert hat, oder die hergestellte Verbindung war fehlerhaft, da der verbundene Host nicht reagiert hat. ---> System.Net.Sockets.SocketException: Ein Verbindungsversuch ist fehlgeschlagen, da die Gegenstelle nach einer bestimmten Zeitspanne nicht richtig reagiert hat, oder die hergestellte Verbindung war fehlerhaft, da der verbundene Host nicht reagiert hat
at System.Net.Sockets.Socket.Receive(Byte[] buffer, Int32 offset, Int32 size, SocketFlags socketFlags)
at System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size)
--- End of inner exception stack trace ---
at System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size)
at System.IO.Stream.ReadByte()
at EZ_B.BrookstoneRover.Connect()
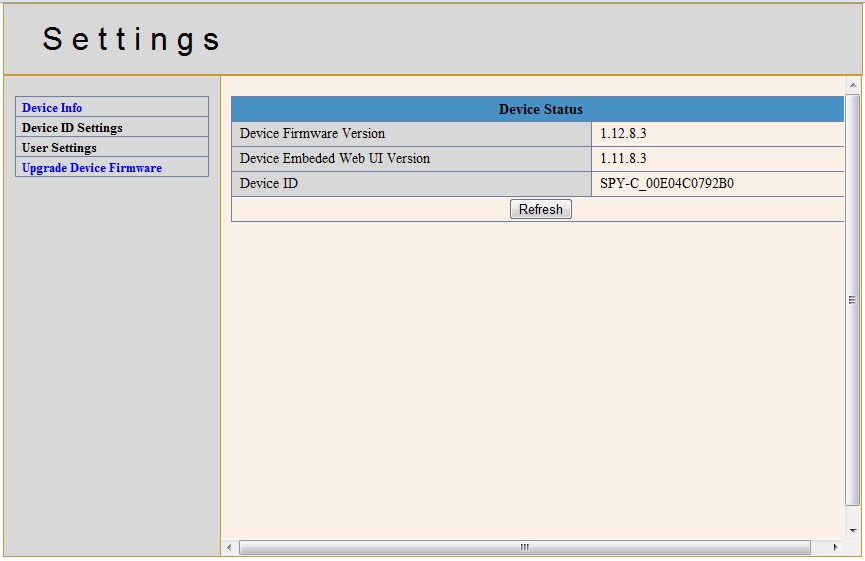
I am using ARC version 2013.12.02.00.
If you neet some extra information please teach me how to get it from the rover.
I can access tank's web interface using https://192.168.1.100/ address and am able to log in with AC13/AC13 credentials, but can't do anything else because this interface offers read-only capabilities.
Scanning tank's ports brought me nothing.
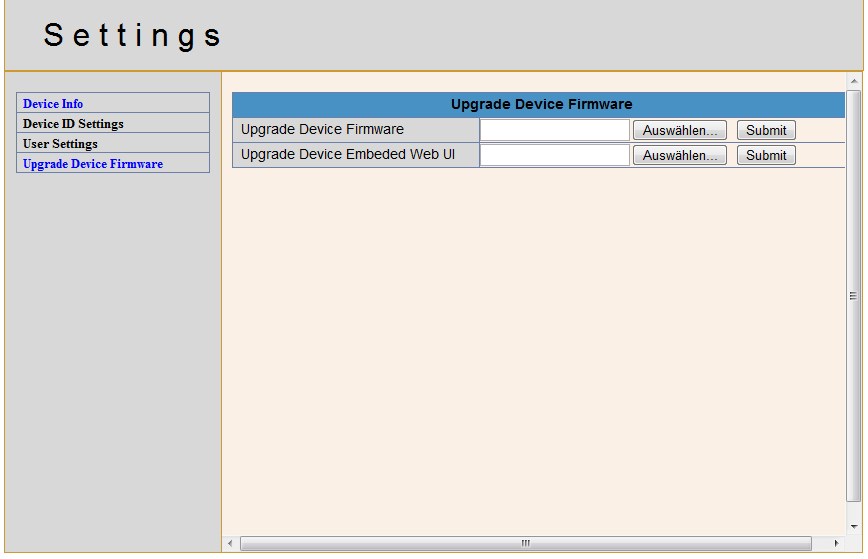

Looks like your rover is speaking German and ARC is expecting English. You might want to see if you can get a copy of the US market rover firmware and flash it to see if that changes it to 100% English language.
Alan
No, it isn't a rover who speaks German, it is a localized .NET Framework version on my laptop. To say more precisely, I have a multilanguage Windows 7 and .NET Framework outputs error messages in current user's UI language. I tried this with English and nothing changed in behaviour.
How certain are you that the Spy Tank sends the exact same data on connection? It looks as though the control is expecting a message back to say "Hey ARC, I'm now connected" but ARC is not getting that message. If the Spy Tank sends a different message to the Brookstone Rover this may be where the problem lies.
I am completely unsure. I am just trying to get this tank controlled from PC trying various software including ARC, self-made C# code, Wireshark, etc, etc. ARC is by now the only PC software which was able to make this tank to do at least some noise.
I was hoping that projects in ARC are editable and I can change IP address, port and some other data, but it turns out that projects aren't editable. So probably I need to uninstall ARC and try something else.
No ARC controls aren't editable since the software isn't open source.
You could always add an EZ-B to the rover and connect to it via a H-Bridge for control, after all the ARC software is built specifically for the EZ-B rather than a freeware application to control rovers and drones. You will also find ARC will run a lot smoother with an EZ-B connected since everything in the software is built on the EZ-B rather than the other way around (there's an official explanation about it somewhere).
Even without language being the issue, I still wonder if the device is firmware compatible with the Brookstone rover. Clearly the Rover is listening for or replying with something different, which is more than likely firmware controlled. I would hate to have you bork your device by applying incompatible firmware though, so "at your own risk" if you try it.
Alan
Sorry, ARC does not support that device which you posted. I'll pick one up this week and see how much work it is to add... If I have free time in the next few months i'll see what I can do .. Supporting 3rd party robots isn't a priority as we have our own platforms which are far more modular with increased functionality.
.. Supporting 3rd party robots isn't a priority as we have our own platforms which are far more modular with increased functionality.
I know very little about the SDK but could he manually make a control in the sdk?