Mickey666Maus
Germany
Asked
— Edited
Dynamixel With Ezbpi Server
I am trying to control my Dynamixel AX-12a with the EZBPi, but when I try to connect ARC it disconnects shortly after...
Is there a wiring schematic or a tutorial on how to do this?
I guess I missed something...maybe the port in the configuration is wrong?
A pinout for the EZBPi would be helpfull!!
Related Hardware (view all EZB hardware)

Raspberry Pi
by Pi Foundation
Run Synthiam ARC on Raspberry Pi 4+ with Windows 11 for robot control; use external EZB/Arduino for reliable I/O, SSD/USB storage recommended
Wi-Fi
Servos
✕
Camera
Audio
UART
✕
I2C
ADC
✕
Digital
✕
Related Robot Skill (view all robot skills)

Dynamixel
by Robotis
Open-source ARC plugin to control Robotis Dynamixel servos (XL-320, AX-12, XL430) via EZ-B, Arduino or Robotis. Supports position, speed, accel.
Requires ARC
v53

What power supply/battery are you using? Are you connected straight from power to AX-12A or is there something in between?
Continue using this thread. I’m removing the duplicate comment on the raspberry pi post
I have not even connected the Dynamixel, the EZBPi disconnects as soon as I am connecting my ARC Project which has the Dynamixel plugin included...did you manage to connect the Dynamixel AX-12a to a Raspberry Pi running EZBPi? If so please let me know which OS you are running and how you connected ARC and the Servo!
BTW, I am also testing different options to drive those servos and had trouble with the UART in general...dont know if this applies to the EZBPi though!
https://raspberrypi.stackexchange.com/questions/63468/uart-send-receive-not-working
Yah - I used the raspberry pi with the plugin in one of my live hacks. It was the hack where i demo'd the raspberry pi.
You'll need to provide more detail on everything you're asking about. Before jumping ahead with asking about something else, this thread should be kept to the dynamixel discussion.
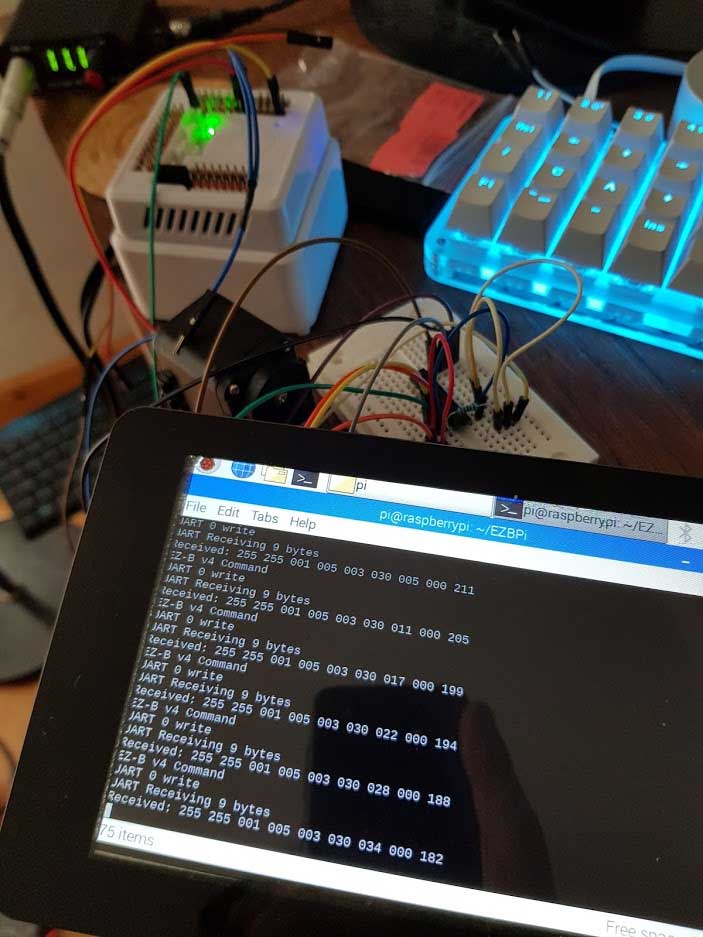
Are there log files in the debug window of ARC on the pi when it disconnects? What are controller are you connecting to? Explain what you're doing.
I want to connect the EZBPi server running on my Raspberry Pi to my Dynamixel servos! Is this possible? How should I wire this...which GPIO should I connect?
I am using a Rasbperry Pi 3B+
@DJSures I double checked what you did in the Live Hack, just to make sure...so if I am getting it correct you just hooked up the plugin but never moved a servo right?
So if I can track my issue right, this seems to be a problem of the OS that the Raspberry Pi is running... I would recommend, that at some point we should have a downloadable image for ARC Pi to make sure these problems don't persist?
Since Raspian Jessie and also in Stretch the OS is hijacking the serial port for Bluetooth connectivity...you will have to reconfigure the Pi, which is not so bad...but it is a problem if you want to connect and do not know about the serial port issue!!
https://spellfoundry.com/2016/05/29/configuring-gpio-serial-port-raspbian-jessie-including-pi-3/