Mastersailor

Continuous Servo
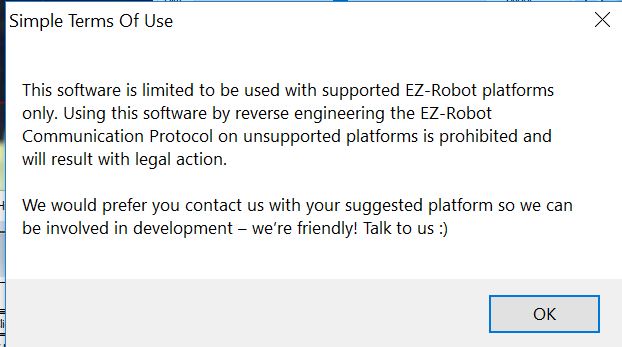
Greetings, I am trying to accomplish the following ? Get servos working from the adventure bot program. I am only able to get one working on the mobile platform and none on the ARC program. D1 and D2
pins being used. Robot set up in client mode. I have taken one 12v gel battery, run it through a step down to the brain. Voltage @ 7.4v. (I understand that I can later, after this proof of concept), run full 12v to run 2 wheelchair motors for a four foot long tank, with some (to me) complex functions for our orchard . When servers are interchanged both servos work independently. I would like to hook this up remotely via the internet in another state and operate it remotely. I am not sure if there is a tank tread servo protocol for turning in a more efficient way other than one servo on and one off it is likely doing this manually is faster. That is not the question right now.
Forward servo left and right wheel set @ 180 reverse set @ 1.
Greg
PS I have a broadcast gateway in place.


Perhaps you have forgotten that the FIRST digital pin on the EZB is D0 so using D0 and D1 may solve the problem.
https://www.facebook.com/greg.hurt.18/videos/1624962970928541/
Thanks for your interest but not the issue. servo profiles are on vid.
eek
May look more like this. This bad boy is six foot long.
I'm sorry but this issue is unresolved. Despite our best efforts. I will pay for the controller. If I could Skype someone who could help it would be great.
load ARC on your windows pc: https://www.ez-robot.com/EZ-Builder
add continuous rotation servo Movement Panel control to your project: https://synthiam.com/Support?id=12
configure the continuous rotation servo Movement Panel to use the servo ports that are connected. Also configure the forward, reverse and stop speeds of the continuous rotation Movement Panel for your servo. Read the manual and watch tutorial videos for information. Watch the video on how to calibrate a servo. It's all there. Follow the instructions, i cannot rewrite the instructions here. It is too much to type to rewrite That's what the learn section is for
That's what the learn section is for
add the mobile interface builder to your project: https://synthiam.com/Support?id=196
configure the mobile interface builder and add the JOYSTICK PAD control to the UI
enable the VARIABLE SPEED CONTROL checkbox on the JOYSTICK PAD settings in the mobile interface builder *Hint: put your mouse cursor (That's the little arrow on the screen) on the blue question marks to read information about settings
If you have further questions, use The RObot PRogram episodes for your product. The learn section is amazing and has everything you need. Alternatively, if you do not wish to build the robot your self, check your local area for anyone who may be interested for hire to build a robot for you. You can direct them to this website (www.ez-robot.com) and they can follow the instructions to build the robot - which always an option - because there's people out there who love to help
Have fun!
Resolved
Glad to hear it
It's pretty neat that you're building a robot for your orchard - it'll be awesome!