TerryBau
Constant Disconnection And Myriad Of Issues
The system takes forever to connect, then it drops connection (have windows defender and allowed it through, shut down webroot)... once connected ARC may or may not connect, when that happens i have to restart EZRobot. Once started, it stays up for about 5 seconds and then the camera shuts off and i notice no more connection, have to shut ARC down, reboot EZRobot start again, rinse lather repeat.. then when i play a sound file that is imported and engaged through VR... wait for sound, Hello, play wav (wav will play 50% through, then loop to beginning in an endless loop). How do I get this thing to work before i return it... Questions What product are you connecting to? (i.e. Arduino, ESP-32, EZ-Robot JD, Raspberry Pi, Robotis Bioloid, etc). - EZRobot 4 What power source you providing the robot? (Battery, wall adapter, how many volts/amps, etc) Wall Adapter 7.2 volts Does the robot make a startup sound when powered on (if applicable)? Is there a verbal message spoken from the product on bootup (if applicable)? Have you checked the product manual? - YES If Wi-Fi device, are you connecting the correct WiFi network of the EZB/Robot? - Of course Do you have two network adapters? (i.e. one for the internet and one for the robot) - didn't work well, so just one What error message is displayed in the status window at the bottom of ARC? 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB EZ-B v4.x/2 Native Firmware ID: 65-89-0-0-223-255-59-58-58-38-38-38 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Setting battery monitor voltage: 7 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Setting battery protection: True 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Setting i2c rate: 100000 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB EZ-B voltage is 12.232328478 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB EZ-B temperature is 25.07708920892138208C 2021/04/23 13:11:39 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Connected 2021/04/23 13:11:49 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Comm Err: System.IO.IOException: Unable to read data from the transport connection: An established connection was aborted by the software in your host machine. ---> System.Net.Sockets.SocketException: An established connection was aborted by the software in your host machine at System.Net.Sockets.Socket.Receive(Byte[] buffer, Int32 offset, Int32 size, SocketFlags socketFlags) at System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size) --- End of inner exception stack trace --- at System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size) at EZ_B.EZB.gkBAWwT85a2uhRt3Y4T(Object , Object , Int32 , Int32 ) at EZ_B.EZB.eihfh6Cn7Z(Int32 , Byte[] cmdData) 2021/04/23 13:11:49 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB BbytesToExpect: 2 2021/04/23 13:11:49 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB ? Received: 0 0 2021/04/23 13:11:49 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Disconnected 2021/04/23 13:11:59 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Attempting connection on 192.168.1.1:23 2021/04/23 13:12:01 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Connection Failed: System.Net.Sockets.SocketException (0x80004005): No connection could be made because the target machine actively refused it 192.168.1.1:23 at System.Net.Sockets.Socket.InternalEndConnect(IAsyncResult asyncResult) at System.Net.Sockets.Socket.EndConnect(IAsyncResult asyncResult) at System.Net.Sockets.TcpClient.EndConnect(IAsyncResult asyncResult) at EZ_B.EZB.Connect(String hostname, Int32 baudRate) 2021/04/23 13:12:01 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Disconnected 2021/04/23 13:14:05 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Attempting connection on 192.168.1.1:23 2021/04/23 13:14:07 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Connection Failed: System.Net.Sockets.SocketException (0x80004005): No connection could be made because the target machine actively refused it 192.168.1.1:23 at System.Net.Sockets.Socket.InternalEndConnect(IAsyncResult asyncResult) at System.Net.Sockets.Socket.EndConnect(IAsyncResult asyncResult) at System.Net.Sockets.TcpClient.EndConnect(IAsyncResult asyncResult) at EZ_B.EZB.Connect(String hostname, Int32 baudRate) 2021/04/23 13:14:07 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Disconnected 2021/04/23 13:14:14 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Attempting connection on 192.168.1.1:23 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Connected to 192.168.1.1:23 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Reports EZB v4 OS With Comm 2 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Firmware 'EZ-B v4.x/2 Native Firmware' on 'EZ-Robot EZ-B v4.x/2' supports the following capabilities:
- ADC with 12 bit Resolution
- Can stream Audio v4 codec
- Reports battery voltage
- Reports CPU temperature
- Read/Write Digital I/O Ports
- Hardware UART TX/RX with DMA buffer and adjustable baud rate
- I2C Master
- LIPO battery protection & shutdown
- PWM Duty on digital ports
- PWM servos on digital ports
- PWM servos on digital ports can release their position
- Servo speed for PWM servos on digital ports
- Has NVRam configuration and can be restored to default settings
- Transmit Uart TX on all digital ports
- Adjustable I2C clock speed
- Configurable UART TX digital port baud timing
- Ultrasonic Ping distance sensor support
- 12 Byte Unique Identifier
- Can stream video v4 codec
- Native UART Connectivity from ARC
- Native WiFi Connectivity from ARC
- Broadcasts to ARC's PnP network scanner
2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB EZ-B v4.x/2 Native Firmware ID: 65-89-0-0-223-255-59-58-58-38-38-38 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Setting battery monitor voltage: 7 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Setting battery protection: True 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Setting i2c rate: 100000 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB EZ-B voltage is 12.340476630 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB EZ-B temperature is 24.86635736682960576C 2021/04/23 13:14:15 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Connected 2021/04/23 13:14:22 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Speech Recognition Culture: en-US 2021/04/23 13:14:22 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Loaded speech recognition successfully 2021/04/23 13:14:29 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Speech Recognition Culture: en-US 2021/04/23 13:14:29 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Loaded speech recognition successfully 2021/04/23 13:14:54 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Comm Err: System.IO.IOException: Unable to write data to the transport connection: An existing connection was forcibly closed by the remote host. ---> System.Net.Sockets.SocketException: An existing connection was forcibly closed by the remote host at System.Net.Sockets.Socket.Send(Byte[] buffer, Int32 offset, Int32 size, SocketFlags socketFlags) at System.Net.Sockets.NetworkStream.Write(Byte[] buffer, Int32 offset, Int32 size) --- End of inner exception stack trace --- at System.Net.Sockets.NetworkStream.Write(Byte[] buffer, Int32 offset, Int32 size) at EZ_B.EZB.eihfh6Cn7Z(Int32 , Byte[] cmdData) 2021/04/23 13:14:54 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB BbytesToExpect: 2 2021/04/23 13:14:54 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB ? Received: 0 0 2021/04/23 13:14:54 -04:00 C:\Users\Terry\Documents\ARC\My Projects\B9-V1.EZB Disconnected
Related Hardware (view all EZB hardware)


Uhg, I know how frustrating this can be. There has been other's with this problem and I'm one of them. This sounds like either a power, connection or home network issue.
Good news is that we are always to work through it. Once figured out you can expect a stable connection.
First, you mention you have a camera. Is it connected to the i2C port? if so make sure it has a good secure connection and the wiring is correct back to the camera. Bad connections here can cause some of the issue are seeing. Better yet remove the camera from the EZB and remove any mention of the camera and it's startup from your project. If that's a hassle then just start a new project and add some of the controls you were having problems with.
Next power, You mention in the troubleshooting guide that you are using a 7.2v wall adaptor. These do not supply enough current to power anything used by EZ Robot, servos or other devices. You need a full fledged power supply rated for how many amps all your lights and motors are going to be pulling. Even one servo will brown out an EZB if your power supply is overwhelmed by the amp draw of connected devices. once you are sure you have the right power supply that will supply the needed amps I would suggest not to draw power through the voltage pins of the EZB. Only connect devices that use limited amperage to the EZB. Feed your power hungry devices, motors and lights around your EZB on different circuits.
I'm not a home network expert but I had bad connection issues when I first set up my robot using EZB over my home network. My problem turned out to be an old router that couldn't handle the speed of my connection to it and a weak signal on a crowded channel. I ended up getting a new modern fast router which helped a lot. However my new router was so far away that I ended up adding a dedicated wireless range extender to my network near the robot. This gave me a second dedicated network for my robot's EZB's to connect to. I even hard wired the extender directly to my home router. I then moved both the router and the extender to the least crowded channel I could find. I didn't know that everything in your home and the all the neighbors routers used only 11 or so channels. Most devices are preset at the factory to use a certain one. Most are all set to the same one so everyone around you could be on channel 7 for example. I found the less crowded channel using a WiFI app on my cell phone that scanned all the available channels. It showed how busy each one was so I could pick the one I wanted.
I hope this gives you a place to start and something to look at. It could be something in your ARC project also. Feel free to upload it to the ARC Cloud and let us know it's name so we can look it over for something that may be causing this.
Oh ya, before you do any of my more involved suggestions above completely disable both your firewall and antivirus programs in your control computer. This may be scary but just for troubleshooting, do it temporarily just to test if there is any improvement to your issues. In the past I've made exceptions in both and still had them block or hinder my projects.
Ok so what i have done thus far is:
I did all the anti virus shut down, but i am not running their USB dongle so my only connection is to the EZB when I am on it, but shutting em all down didn't fix anything... now with the aforementioned steps i wonder if i can go back to the dongle... but either #1 or #2 fixed, but its been sporadic, i had no issues yesterday with camera (meh maybe it was mounted loser today) or virus software... lol
i also removed the VR code i was using... this is where i saw a lot of the sound issues... i then added a script library (can't think of the actual name) and then added a script for each sound and in fact found using EZ-Script was nicer than blocky, since that, no issues with the sound... i love that we can clip the sounds
I had thought i read you need to run EZB at 7.2 volts? I have two 12 volt power sources (1 running all ardurino board, lights, and EZB (but through a voltage regulator and another 12 volt power source running other items, like my amp etc.) should i put my EZB just right to 12v? I thought servos do not like 12volts esp as they are plugged into the EZB? so it goes wall to 110 to 12 power block to fuse block then my items are plugged into that fuse block, one being the voltage regulator down'd to 7.2 volts and then EZB connected to that, should i just move the EZB to the 12v?
thanks Dave
Hello Terry,
Just as Dave mentioned, amperage is just as important as voltage when it comes to a wall adapter power supply. Under-current (aka Brown-out) will most definitely cause disconnections and other very odd behavior. A reasonable amperage rating for a wall adapter to power an EZ-Bv4 with accessories (minimal servos) is 1.5 to 3Amps.
You can use a 12V source but you will have to be careful what you hook up to the EZ-Bv4 Digital power rails. The voltage you put in will be the voltage that comes out on the Digital power rails. The EZ-Bv4 does have an onboard regulator but only the analog port power rails, the camera connector, the UART connector, and i2C connectors have the regulated 3.3V voltage. EZ-Robot servos are only rated up to 8.4V so you'll have to use 4.5 to 8.4V to power the EZ-Bv4 when connecting EZ-Robot servos to the Digital power rails. You'll need a lower voltage (6V) for third-party servos.
Let us know what your script looks like that you are trying to run, if you don't use sleep commands you may be running into lock-up issues due to your scripts demanding too much data all at once.
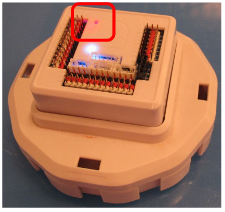
*Edit: A lock-up issue can be diagnosed by checking if there's a red LED constantly on in the upper left of the EZ-Bv4. Audio will cycle during a Lock-up.
EDIT: I see Jeremie posted while I was writing this. What he said. LOL. A lot of what I said but he was a lot more elegant and to the point. LOL. Thanks Jeremie!
As far as the power supply setup goes, if you are running switching power supplies that can deliver the needed amps to your lights and devices you should be OK. Wall Warts do not have the needed capacity to handle your devices amp needs. More so when they start up.
The EZB can be powered anywhere from 4.5 to 16 volts DC. What ever voltage that you supply the EZB, you will have the same voltage at the power pins on it's digital ports. So if you are supplying 12vdc to the EZB you will also have 12vdc at it's digital ports. If you plug in a servo into one of that EZB's digital ports , the servo will be fed 12v. A lot of servos have different power needs. Some 5vdc, some 7.4vdc, and other voltages. You should check your servo's operating voltage and it's peek amp draw before you operate it. If your Power supply wont supply the needed amps, get a bigger PS. However you can buck or boost the voltage to the servos with DC to DC converters. Again, the converter needs to handle the amps being pulled through it by the servos.
For example; I feed most of my robot with a AC to DV power supply. I have a lot of devices that need 12vdc and a three servos that need 7.4 volts. I let the PS directly feed the many devices that want 12vdc. However I run a separate 12v circuit to the three 7.4 volt servos with an adjustable buck switching converter between the two.
I hope this makes sense.
However, from what you mentioned I don't think power is your issue unless your power supply can't supply the needed amps and the EZB is browning out.
It's good that you are starting to figured out your sound issues. If your scripts are not written properly your sound (or other devices) could stop midway, be delayed or even not start. Timing in a script (or different scripts running at the same time) is everything. ARC takes advantage of Windows multithreading abilities. This means several scripts can run at the same time. If one script or command is running when you send a second one the second one may not run or be delayed. You will see this mostly when you want the same device to do different things. You may think you sent them to the device at different times but they smashed into each other. One problem I had like this once was when I had a script looping. Then I had a second script send a command to the same device that was in the looping script. The second script never did anything.
Another problem is the WIFI pipeline between the computer and the EZB. Only so much information can fit through there. If it's overwhelmed this is where you will start seeing your delays, missing or wrong actions and other weird stuff. A good router and a strong signal with little traffic is the best way to fight this. Like I mentioned above, script timing is important here also. Make sure you use Sleep or Hold commands to stop the script that don't need to run till something else happens. This will also allow other script that are running to send their info without clogging up the computer resources or the WIFI pipeline.
As far a resources; stop any monitors or looping scripts from running till you want to see them or need then till you get this worked out. Most offensive of these are the ADC monitors. Before DJ streamlined ARC (Then called ARC) I couldn't keep any ADC monitors running or I my project would slow down to a crawl and weird things would happen (like you are seeing). Looping scripts that check status of anything may also have this effect.
Hopefully someone else will fact check me on this and chime in to correct or improve on any of this. Maybe someone else has better insight on what your disconnect issue could be. It's encouraging that you are having longer periods of stability and connection. You're making progress. I'd encourage you to look closer at your home wifi setup and also your scripts and running controls.
wow thank you all, this is a great help, will def. get there
My EZB4 and ARC program will not connect unless I disable the anti- virus program I have.
After I shut it all off, everything works
EzAng
Here’s the wifi connection troubleshooting guide. It’s best to check it out: https://synthiam.com/Support/troubleshooting/Troubleshoot%20WiFi%20Connections
there’s details about power consumption and i2c devices, etc.. Also a big one is wifi saturation. I don’t ever use wifi on my robots because it’s not reliable for the performance needed. Everything is hard wired with usb