
jayceekeys
Charging
Hey guys,
Whilst I wait with everyone for the new electronics etc, I thought I would ask about how everyone plans to handle charging. My main use will be for remote camera and driving over the web. So ..... If I have a JD, how do I ensure he has charge when I remotely connect? Can I leave him "plugged in" and then disconnect from charge source by walking away from the plug? Maybe I can connect whilst he is still plugged in ? Maybe when I leave home, he's taken off the charger and I hope he still has charge by the time I connect ? I even thought about having a rod with two contacts on it ..... I get JD to grip the two opposite ends of the rod (gripping the contacts) so that contacts inside the hands pick up the charge?
Any ideas I would love to hear !
Cheers,
Jay 

According to DJ (if memory, once again, serves correct), the EZ-B v4 has a "stand-by" mode of sorts that consumes almost no power while activated. Hope this helps a bit!
Ah kewl !
Hopefully that will mean that it will at least hold the charge until I connect to it .... Even if it means that after use I can't recharge until I get home (although I think I will have to solve that !). I was thinking I might have had to use something like a wifly which takes a few mA and use that to switch the EZB power but if it has a native standby that would be awesome!
Cheers
Jay
If you're worried, how about a bigger lipo battery?
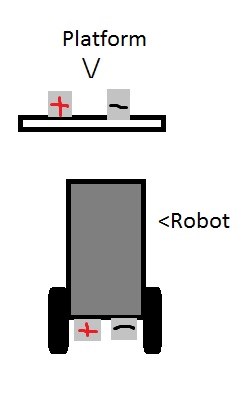
This is something I'm interested in too. I thought of the idea where 2 wires drag behind the robot and when the bot's battery is low, you could drive it to a platform with 2 large metal plates with a charger connected.
Dragging wires sounds a bit dangerous (running over water can fry it) maybe add metal plates to the back of the bot, one for each wire? Then just put metal plates on the charger that match up to the ones on the bot. It would be safer and probably stop the wire from wearing out from the dragging.
Hi rryerson,
I did think about the larger battery, but figured that where I'm away from home for a few days, even a large battery could be used up it the hot wasn't in some form of sleep mode.
Technopro .... I had a similar thought but there's the consideration of making sure the polarity never gets mismatched if the robot is orientated wrongly. The Rovio I had used a similar dock with contacts that pushed up into the base of the bot when the weight of the wheels was on the dock. It was kind of a funnelled shape dock so it guided the bot into correct position. I kind of like the idea of a kind of dipole arrangement where the bot grips either side using the grippers and clamps onto charge contacts maybe?
The only issue would be that these gripper contacts would need to be switched to disconnect after so that when it grips other items there is no continuity between the arms causing a battery short. That should be easy enough though.
Jay
You could easily wire a barrel jack and plug that you could just drive away from. I also like your idea of making charge contacts in the hands, but it is a bit more ambitious and would take some thought for safety.
The real challenge is automatically plugging back in. There are some discussions of ideas for that too, but if you just want to make sure he is powered up the first time you remotely connect but still have mobility, then your initial ideas are good ones.
I plan something similar when my big bot is done, he'll have a "garage" for my small bot and keep it charged until needed.
Alan
My other design uses 4 plates that stick up or down and as the robot drives into the platform plates the robots plates make contact. These plates could be retractable on the bot. one idea is to put indents on the areas the robots wheels should be, thus guiding it into place. You would put it against the wall in the orientation such as positive on left, and robot facing out.