
jayceekeys
Charging
Hey guys,
Whilst I wait with everyone for the new electronics etc, I thought I would ask about how everyone plans to handle charging. My main use will be for remote camera and driving over the web. So ..... If I have a JD, how do I ensure he has charge when I remotely connect? Can I leave him "plugged in" and then disconnect from charge source by walking away from the plug? Maybe I can connect whilst he is still plugged in ? Maybe when I leave home, he's taken off the charger and I hope he still has charge by the time I connect ? I even thought about having a rod with two contacts on it ..... I get JD to grip the two opposite ends of the rod (gripping the contacts) so that contacts inside the hands pick up the charge?
Any ideas I would love to hear !
Cheers,
Jay 

To avoid any dragging you could use a servo to lower the contacts down onto a charge plate.
Hmmmm,
Have you you looked at a Wowwee Rovio charge dock ? That has the contacts that raise when the weight of wheels is on the dock. Here's a link to a we page that has photos of it:
Rovio photos
Cheers,
Jay
There are a few ideas on this in the auto docking/charging topic that was hot 6 to 12 months back. If you can find it (I don't have time to search for it - sorry) there may be some ideas in there for you to use.
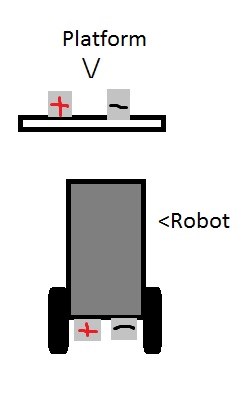
Personally, I've always envisaged my robot to have a couple of contacts that line up with the base's contacts for charging. Either a servo operated "cover" or like the Rovio a weight based system to expose those potentially dangerous contacts when it's safe to do so but at all other times they are out of the way.
You could use wireless/contactless charging along the lines of how electric toothbrushes and wet shavers do however the efficiency of such a system is drastically reduced.