Dual Hbridge W/PWM— Dual H-Bridge w/PWM movement panel: control two DC motors' direction and speed via EZ-B PWM for responsive forward/reverse/turning.Try it →
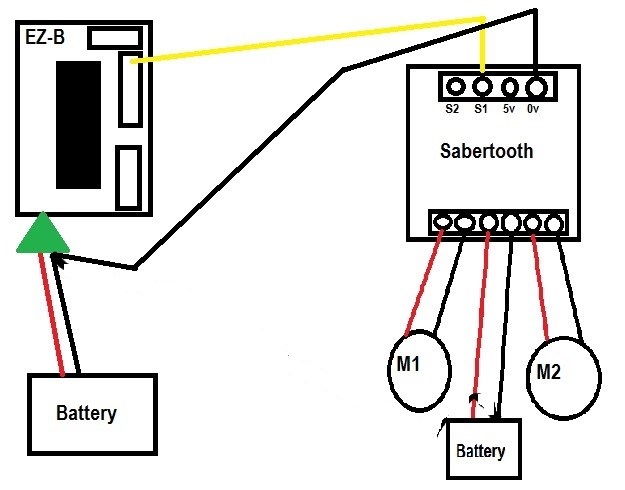
I do not feel confident if that will work. This is because the sabertooth's motor battery GND might be isolated through the hbridge from the microcontroller input.
To find out if they are connected, use your volt meter set on OHMS reading. Check for conductivity between the 0v and motor gnd.
If there is conductivity, then it should work.
PS, you do not need to get the 0v from the battery of the ezb. You can also get the gnd from a gnd pin on the ez-b. That means using a peripheral cable (the 3 wire servo cable) to the ezb. White is signal and Gnd is black. The red you would not use.
That's a much cleaner way of connecting to the sabertooth - with one single cable to the ezb
 Dual Hbridge W/PWM
— Dual H-Bridge w/PWM movement panel: control two DC motors' direction and speed via EZ-B PWM for responsive forward/reverse/turning.
Try it →
Dual Hbridge W/PWM
— Dual H-Bridge w/PWM movement panel: control two DC motors' direction and speed via EZ-B PWM for responsive forward/reverse/turning.
Try it →

I do not feel confident if that will work. This is because the sabertooth's motor battery GND might be isolated through the hbridge from the microcontroller input.
To find out if they are connected, use your volt meter set on OHMS reading. Check for conductivity between the 0v and motor gnd.
If there is conductivity, then it should work.
PS, you do not need to get the 0v from the battery of the ezb. You can also get the gnd from a gnd pin on the ez-b. That means using a peripheral cable (the 3 wire servo cable) to the ezb. White is signal and Gnd is black. The red you would not use.
That's a much cleaner way of connecting to the sabertooth - with one single cable to the ezb
ok thanks dj. did you check out rich and i's ar drone 2.0 compatibility posts? I think i've found what parrot failed to support you with.
If there isn't continuity between 0v and Ground you could always jumper them...
ok well ill look at this when I get the sabertooth.
Bookmarking........
Your selection has been bookmarked.