
Anne2255
USA
Asked
— Edited
Can Ez Robot Parts Be Used To Build A Dollhouse Elevator?
Hi! I have a large 6 story dollhouse that I want to build a motorized elevator for, but I'm having trouble finding parts & a tutorial. I was wondering if any of the parts/motors that are available from EZ Robot could be used to build one. Does anyone know? I want to be able to control it with a remote control and I would need it to stop at the right place for each floor of the dollhouse. Any help would be greatly appreciated! Thanks!

It is a very easy application that can be self contained using any Micro-Controller board such as (Arduino,RPI or any other). However, EZB is much more powerful and can be used even for more complicated tasks and you may need to spare a computer on top of that to manage EZB.
It could be off topic but this is some details for operation .
You need 6 sensors and Servo-Motor Continuos where torque depending on the weight needed. and you can also minimize the the Sensor setup by adding gear box with Opto-detector to count the number or Turns while moving up or down . You count the turns to decelerate and stop at the appropriate level using PWM signal if interested. The Remote Control with IR detection to read the signal of appropriate key to stop at the needed level taking into account the number of turns or Hard wired to Keypad (almost 1$) to operate. It is advisable to have a top and bottom limiting switch to reset the counters after any electric shutdown or manual operation to be ready for automatic service. I hope this can help
Yes, that all should work but there has gotta be a better and eaiser way.
I agree with two points Hhammoud gives; limit switches (but make sure you have blocking diodes installed on each on so you can reverse directions) and needing a computer of some kind to controll EZB with ARC software.
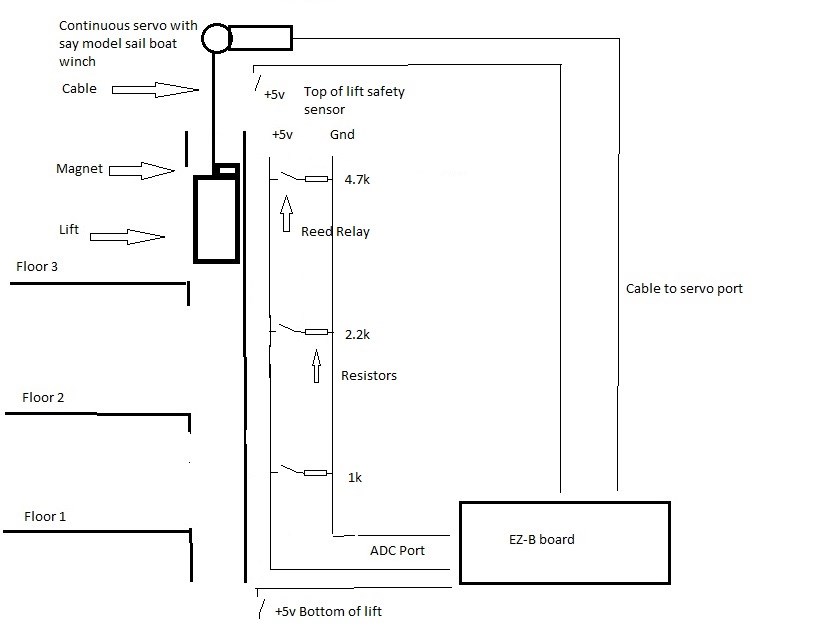
I think all you may need is a continuous servo with a pully and cable system attached to it. You can set the stop points in ARC. I'm a little unsure about that though. Not sure if a continuous servo can give feedback info as it's pot may be disabled. If so then you will have to add your own muilt turn pot and attach it to the ADC port of EZB. This way will give you the added benefit of useing a small DC Gear motor instead of a servo. They are stronger and quieter then a servo. Also this way you will need to write scripts to move the motor and have the motor stop at the different stop points determined by values returned by the pot. You can start this movement from other scripts. Each script can be one stopping point value. You would have 6 stop scripts, one for each floor. That way you only have to push the start button for the floor you want to stop at. Your laptop screen can be your remote and you could have the stop scripts arranged on your screen any way you want.
You could even have your doll house evevator be voice actavated. You could say, "Elevator, 2nd floor" and it would move there without even pushing the start button of the script. Just like in Star Trek.
I have already written scripts like this and can be found in my project "B9 Control" that is in EZ Cloud. I'd be happy to share them with you and help you with the adjustments needed.
EZB could also handle other things in your doll house like lights on and off, doors, water, furniture movement, sound & music or just about anything you can think of.
As far as finding parts you can go to venders on the internet like servo City and The Robot Shop. There are many more places but start there. You'll find most of what you need with them and they are great venders you can trust.
Keep us updated, post pics and vids, ask questions and just have fun! Dave Schulpius
What about a feedback pot, multiturn on through a gear box, and modified servo. At specific resistances it knows its in position.
sorry its brief, I'm on my phone, ill try to explain better when I get to a pc.
edit I guess I missed Dave mention the pot
Dave, I think your idea is the best.
( I thought the same thing;)) For an example.
first, add the modified servo control and run the servo up and down(forward/backward)(assuming you've already attached a rope or string to the servo).
Then, count how long it takes for the servo to lift the elevator to the second floor, third floor, ect. from the first floor.
Then take how long it took and put it into milliseconds(1 second = 1000 milliseconds).
then make a script like this for " first floor to second floor".
I'd avoid time based movements, they aren't exactly accurate.
Switches at each position to trigger a stop or a feedback pot on an ADC for stopping are more accurate. Also, depending on the load in the lift (while minimal and may have little impact) it may take longer to rise up than if it's empty, plus slippage can occur, and over time the rope may stretch.
@dschulpius: I do agree with you and sure it is much cooler to use EZB and do a lot of fancy feature with minimal programing efforts.
My quick feedback based on my old previous experience with actual Elevators and Controllers work. it was really advanced and complex electronics before the introduction of all these new Micro-Controller Gadget nowadays, that made a big difference in operation simplicity and manageability.
before the introduction of all these new Micro-Controller Gadget nowadays, that made a big difference in operation simplicity and manageability.
@Anne2255 I am sure your daughter is lucky one that has a father going all the way to make her happy. Do not hesitate to ask and we are ready to support.
Switch is the Standard method
Pot is great idea but not sure if it is limited with the number of Turns.
Another option is the Groove Infrared Switch can be used for speed and distance Measurement . It is used with the motor that is coupled to a measuring disk (Multi-holes for higher resolution) Sometimes used with the RC cars to control the speed and measure the distance .
Groove Infrared Switch
Speaking of infra red, you could put a sharp IR distance sensor in the top or bottom of the shaft, connect to an ADC port and use the ADC values to determine position. Or a ultrasonic ping sensor. Much simpler.