Asked
— Edited
Battery Level Sensor
I'm struggling to find any info on how to make/connect a battery level sensor for the EZ-B.
Basically, I want to be able to have the EZ-B know when the battery is getting flat so it can then run the script to make the bot find the charging station and plug itself in. Also, when fully charged to unplug itself and go about it's business as usual.
The programming side I assume is pretty straight forward but what I need to know is how can I get the EZ-B to read the battery charge level?
If it makes a difference I plan to use sealed lead acid batteries (2x6V 12Ah).

EZ-B has analog inputs for sensors and just converts the input to a number between 0 and 5v. You can use that number to equivocate true battery level. The problem is what do you use to go from the battery to the input (don't want to fry the board). Perhaps a simple battery monitor that sends a signal to an LED to indicate level, then from the outputs to that LED to the input of your AI on the EZ-B You could put a meter on the indicator LED to see what the voltage reading is as it changes color. Just a thought. I am sure there are probably easier ways to do it, but I'm just a jerry rigger and not an electronics whiz.
This is one I am using on my Mini B9 - battery indicator - 12V It's pretty cheap.
Ooh! These are cool! I emailed them for a bit more details on 6v. Units.
If memory serves me correctly (and it may not, I'm digging in to memory that's not been used for over 15 years) the voltage of a 12V SLA battery drops to around 10.5v when nearly dead and up to 15v when charging, so I'd guess a 6V drops to about 5-5.25v when dead and 7.5v charging, so as long as I can get that info from the battery to ARC somehow (via the analogue inputs maybe? I forgot about them) I can monitor the battery.
Auto charging isn't a deal breaker on the bot but it would be a nice feature.
Those are cool I have to get one.
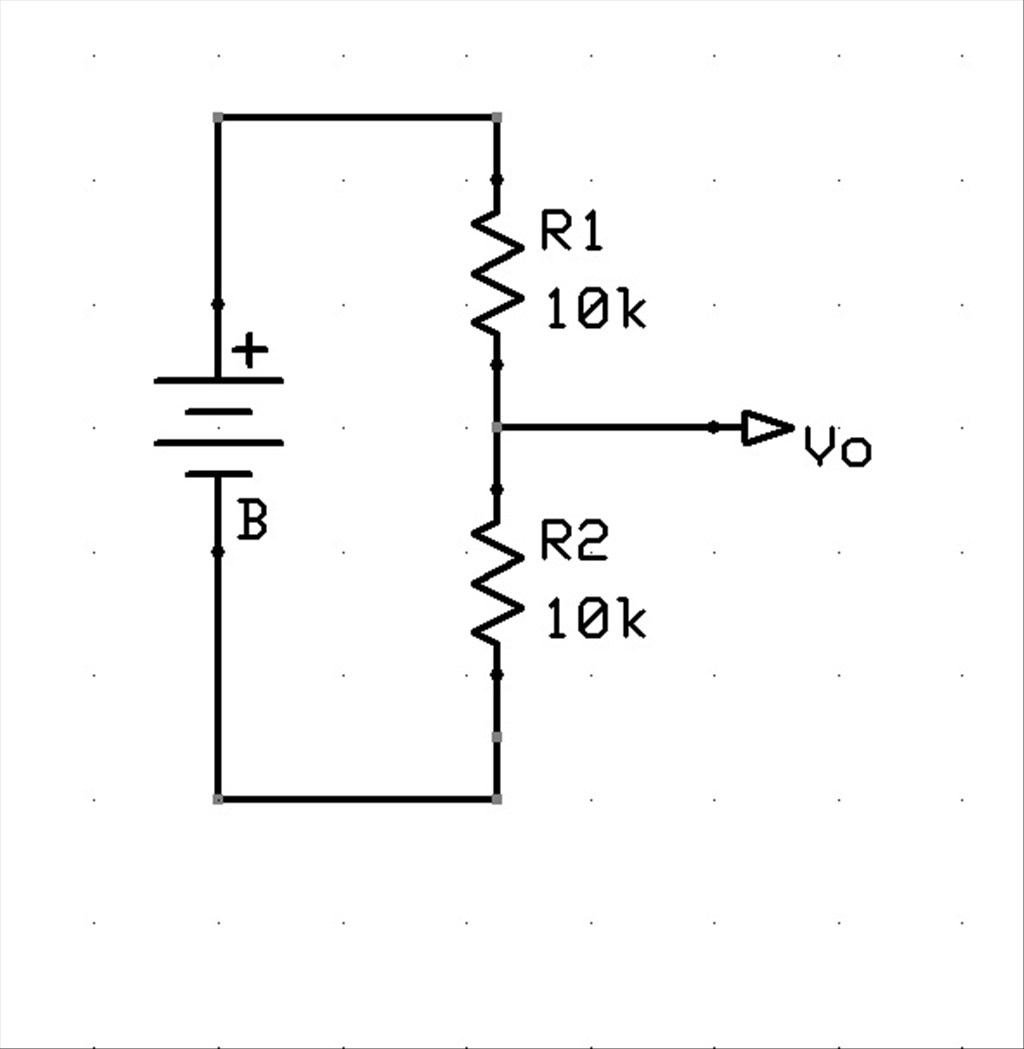
Out of the blue my electronics knowledge come to me and I remembered how to build a voltage divider, which is needed if the ADC ports can't take more than +5v.
I assume this will work but if anyone can see any problems please feel free to flag them up to me.
A basic voltage divider
Vo to an ADC port for the signal.
As I plan to use either 6v or 7.2v halving the voltage (3 or 3.6v) should be fine through the ADC ports right?
Then just look at the battery data sheet to see the discharge curve, depending on battery type I choose, and write the script to suit so when Vo drops to a value which indicates it's almost dead it'll run the code to find the charging base and make it's way to it.
Does anyone see an issue doing this?
RICH that was the same idea i posted on MEL'S POST on AI SOFTWARE but missing a zener for protection for A-D AND A-D has a range of 5-0 volts also you should have 100k going to the a-d to limit the current So thats the problem i see with it there is a much better circuit little better accuracy i can design ,but for this robot it will work fine i also design a automatic gel cell charger with very high current charging 24 volts or less plus with C rate adjust and had a board made for it made for my computer controlled home base design if you or anyone else needs it
Just out of interest, why would it need a Zener for protection of the ADC? I've not seen any voltage divider circuits use a Zener and can't understand what you would protect the ADC from.
The home base I'll just be using an off the shelf charger with modified connection to the battery but if that changes I may be interested in your circuit.
just a added protection in case of a surge, same idea they for for relays a diode also incase the battery is hook up wrong,dnt forget you have 12 volts going in and 5 max on adc input anything can happen on the divider its just good safety practice, some ADC inputs need a cap in parallel with the 100k current limiter resistor for noise i know motorolla cpu's use this idea ,
also another idea when charging a robot,not good to charge the robot with a load on like if using a EZB or ITX BOARD,because of a few reasons mostly the charger wont charge the battery correctly so you need a relay and a small battery to keep power to your boards or have it start up again
ON mine i have a small battery,i first connect the small battery first and then disconnect the second main battery and charge it size of the battery is how much load and then hours of the charging of the main battery