Doombot
USA
Asked
— Edited
Arduino Motor Sheild?
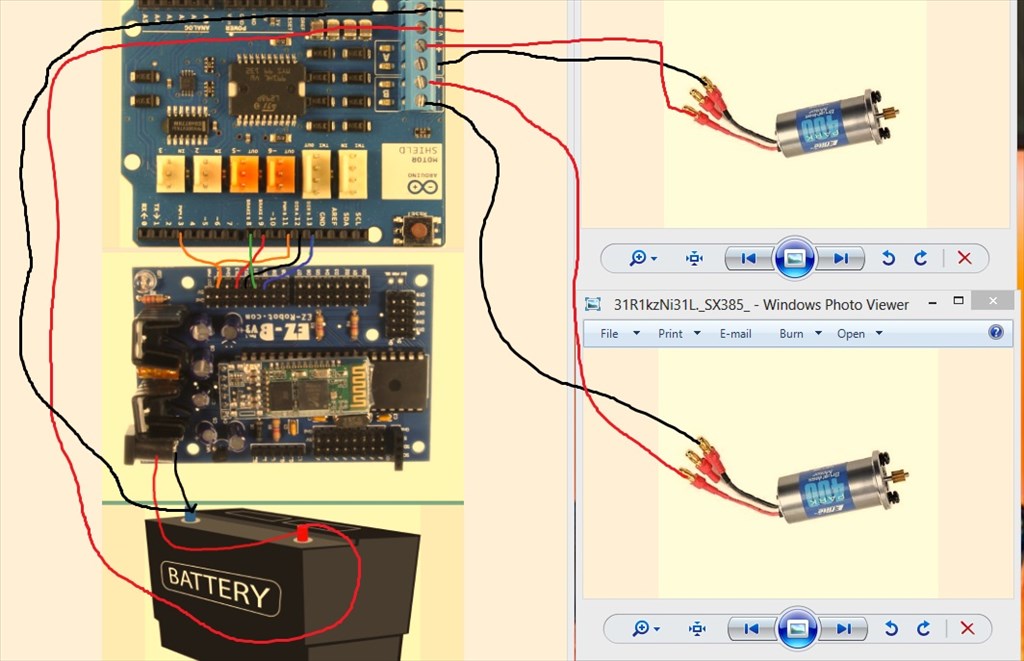
Hello all Can I properly hook up an Arduino Motor Sheild to EZ-B, to run 2 DC motors. If so, can I get some sort of diagram/schematic? I need to be able to control the speed and direction if both motors individually. Sorry, noob question.

Why not use a H-Bridge?
I already have the Motor Sheild. I bought a bunch of Arduino stuff for some F/X Animatronic projects, then I stumbled into EZ Robot. Does this mean I need to buy another motor controller?
Did any documentation come with the shield ? It should be able to interface with the EZ-B, it will require knowledge of what battery power connections are available to drive dual electric motors at a certain voltage and operational amperage as well as what connections are on the shield for PWM input control.
The datasheets which should have either come with the arduino stuff or should be available from where you bought it should have the required schematics with the VCC, Ground, PWM, VM etc. etc. etc on.
If you can link to the datasheets or provide us with details of the shields someone should be able to tell you how to wire it up.
Hello again and thanks for the swift response. I'm at work and I'm on my phone so the best I can do for now is a link to a pic of the motor sheild. Everything is labelled: https://arduino.cc/en/uploads/Main/MotorShield_R3_Front_450px.jpg
Thanks! I'll post a pic of my project when I can.
I think that yes! You can use it, but I not Recommend you to do that , better if you can get an H-Bridge.
@doombot if everything is labeled the answer is yes you can , follow the labeling. The ezb version 3 , the most recent version that was available to purchase was made to accept standard arduino shields. There is a shield compatibility chart I posted a while back too if you search for it or look under my profile of threads posted.
Really? Why don't you recommend? I wanna know I've seen applications where people use the digital out directly to run motors, just using a transistor and a diode. Can a motor controller be bypassed then using this method?
I've seen applications where people use the digital out directly to run motors, just using a transistor and a diode. Can a motor controller be bypassed then using this method?