
Asked
— Edited
Am Confused Making Ed Mech-Jd
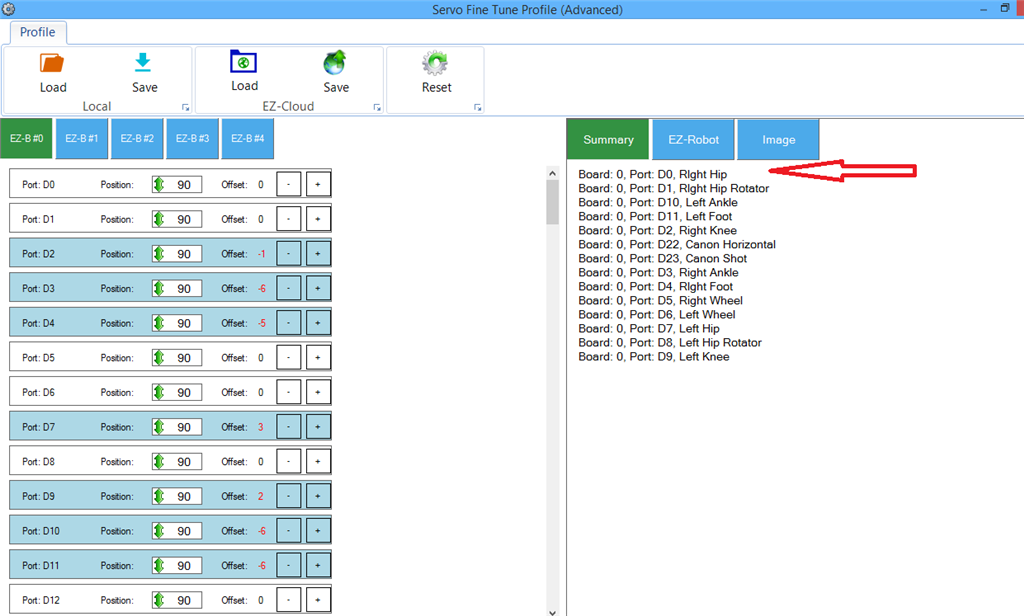
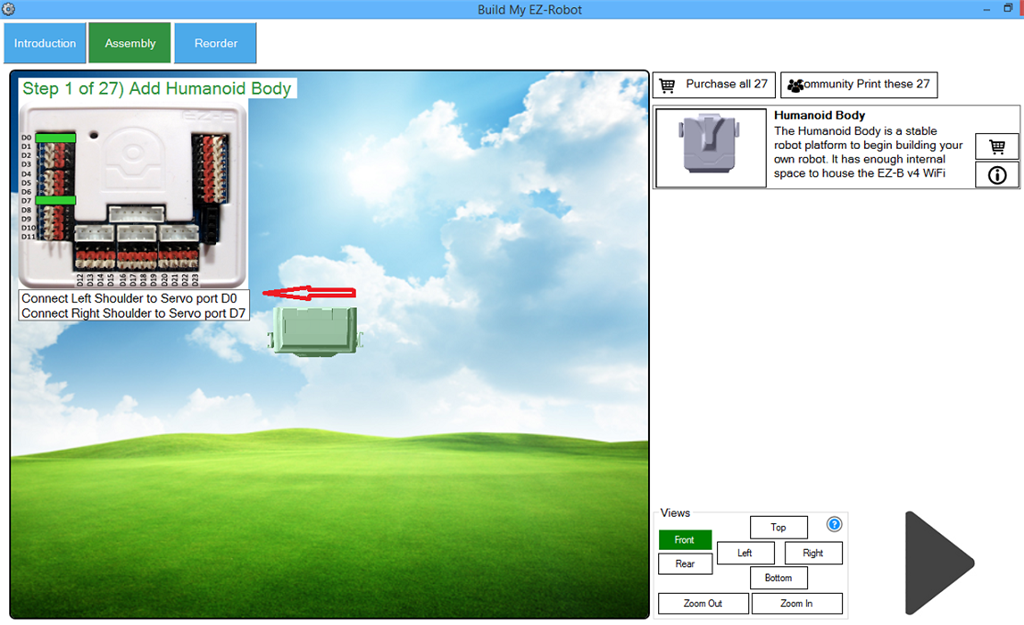
am making a new ez robot.the ed mech chooter but with an jd styl. as am looking the config how to build it,i see diff asigments from ports. one says d0 is left choulder an other says d0 is rotater . what am looking too is when stop driving the ed mech takes a stand position, where can i adjust this stand position.

Don't use advanced servo profile. Use the regular one that shows the image of the robot.
dj
you mean use thisone?
and thisone?
last where can i adjust the rest position after driving?
Yes - that one
All positions are in the Auto Position control - and they're called "Frames". Find out more about the Auto Position control in the manual page. There are instructions and the robot program episodes on how to use it. Ezrobot spends a lot of effort to ensure knowledge is provided. It's up to you to use the help: https://synthiam.com/Tutorials/Help.aspx?id=180
many thanks dj
Your always welcome