
Mac
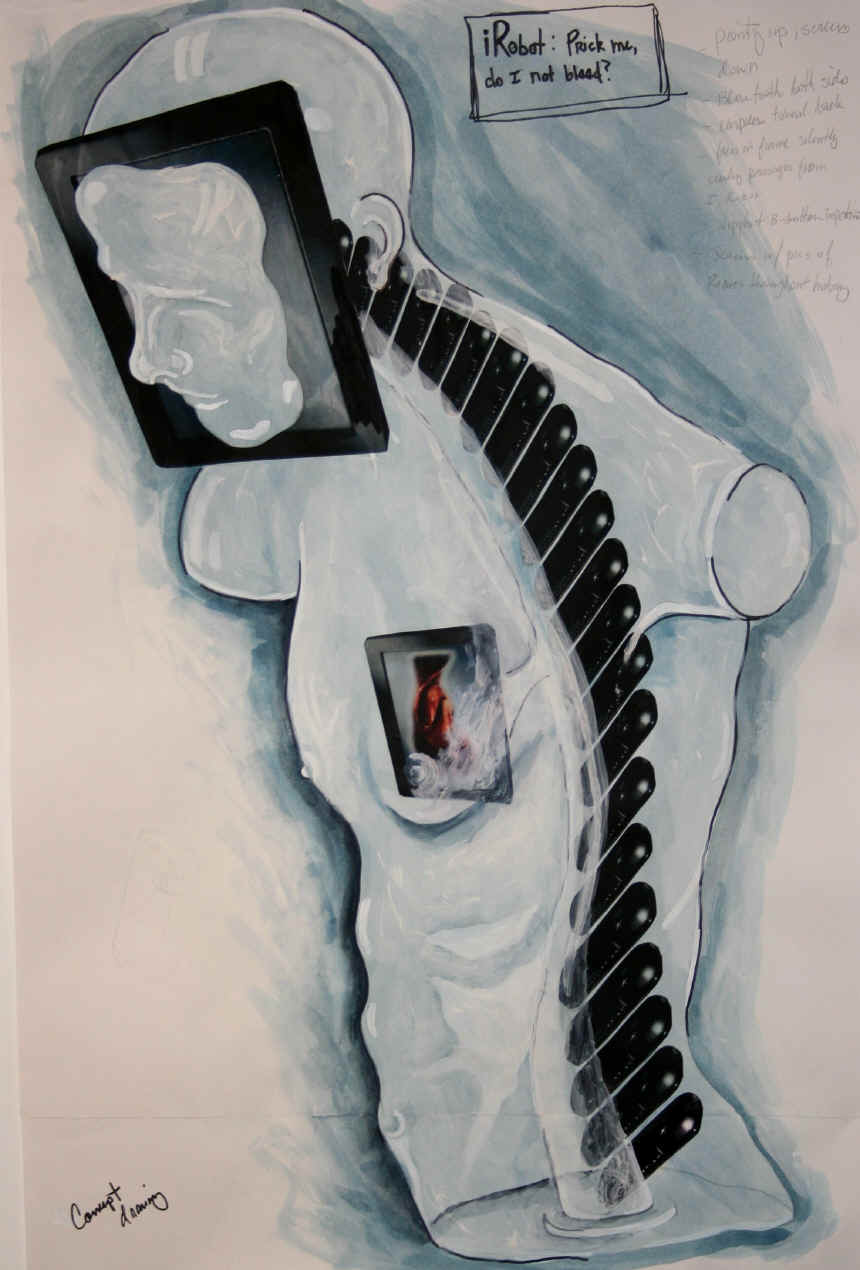
Hello everyone, I'm working on a robotic sculpture called "iRobot: Prick me, do I not bleed?" It's part of my series "The Classics" https://studio407.net/recent_work.htm
The robotics are pretty simple, the head/nook/face uses face tracking with the camera and servo and eventually I will have the torso swivel to face the viewer and I will implement speech.
But my issue is, seeing as it may end up in an art exhibition or two, I would like the sculpture to be autonomous. The "plan" was to have an android tablet installed in the support pedestal running a custom mobile app. But, am I understanding that the mobile app would be an adjunct to the PC running ARC and not the main processing unit? In other words, will I still need a laptop running windows and ARC communicating with the EZb v4 along with the app?
If this is the case, would, say, a Microsoft Surface Pro 4 (i5 processor) have the ability to run ARC, be installed in the pedestal, and make the sculpture autonomous?
I have an "in" with Barnes and Noble (my wife is the store manager, lol) so I could get an extremely good price on Galaxy Tab S2 Nook which has an octocore processor but ARC for the PC won't run on the Android, true?
This is my first post. I love that DJ had the foresight and vision to take all the scattered C++, Arduino, and Processor code and package it in an easy to use graphical interface.
Many thanks, -Mac

aceboss, face tracking in ARC prioritizes the largest (closest) face to the camera. Unless Mac writes the code to use multiple faces, it defaults to 1 which is the closest (largest) face.
In ARC Camera Control, you can specify how many objects to detect, and there will be variables created for each object.
Awesome, thanks DJ!
Although I didn't know this was the answer, specifically, I did test the camera with several faces and that appeared to be the case. And that works well for this piece. I may also add in several colors to track and see how it behaves. Maybe even motion tracking. Anything to help it respond to the audience, even if they're not responding to IT. I've been meaning to submit an update and will in the next dew days. I was working and making progress and then Thanksgiving hit. I have a "chicken or the egg" obstacle right now. I can't move forward without building the pedestal, which will house most of the connections. But I can't build it until I know what all will be connected (etc.) and I won't know that until I have the pedestal built. Lol. That's happened a lot with this sculpture. I'll build one this week. If it works, great. If not, I'll build another and use the first for a house display of some kind.
Mac, Welcome to the world of Robotics. I'm always trying to resolve the chicken or egg question with my build. When I get the answer wrong (which happens all the time) I just rebuild and call it version 2.
Lol, V2, I like it!
Just some process pics. One is just a test fit of the cell phones and spine. Still some tweaking to do but the phones fit better than I could have hoped.
The mold is silicone with a plaster mother mold to keep it rigid. I cast the spine with a two part resin with black dye. Usually silicone gives multiple chances to get the cast right but I tore it up pretty good getting it out of the motor housing area at the top.
This makes me miss art college. Best days of my life! This is bloody brilliant mate!
Haha, thanks Quantumsheep. I don't know bout brilliant but it certainly has been bloody. I've been using a drill for 40 years and yesterday, drilling through the spine for the phone cords, the drill bit caught, grabbed, and shot through the spine and into my finger. Pretty sure I hit bone. Luckily the spine wasn't damaged. That particular hole was exactly what I needed.
This is going to be awesome. I can't wait to see it staring people down as they pass. Love your computer screen in the background in picture 3!