4-In-1 Orientation Sensor
today I wanna buy the ez-robot 4-in-1 Orientation Sensor. at the moment I use another MPU6050 and it works but there is a problem..
after two minutes EZ-Robot says:
Comm Err: System.IO.IOException System.Net.Sockets.SocketException: A connection attempt failed because the connected party did not properly respond after a certain period, or established connection failed because connected host has failed to respond at System.Net.Sockets.Socket.Receive (Byte [] buffer, Int32 offset, Int32 size, SocketFlags SocketFlags) (offset byte [] buffer, Int32, Int32 size) at System.Net.Sockets.NetworkStream.Read --- End of inner exception stack trace --- by System.Net.Sockets.NetworkStream.Read(Byte[] buffer, Int32 offset, Int32 size) by System.IO.Stream.ReadByte() by EZ_B.EZB.(Int32 , Byte[] ) 29.04.2015 11:05 - BbytesToExpect: 14 29.04.2015 11:05 - ? Received: 29.04.2015 11:05 - Disconnected
..and crashes
I use:
ControlCommand("MPU6050", Init)
:loop
ControlCommand("MPU6050", RunOnce)
sleep(200)
goto(loop)
for the updating..
If I change the sleeping time to (1000) the EZ-Board crashes in 5 minutes.
Now I want to use your Original-Sensor and I must wait for it.. because I dont know is this a Software or Sensor-Prob. we will see. So actually I have a new question:
Can you post the script for JD to stand up If he's falling over ?
thanks a lot Smarty

So it works, but then stops? You are getting data from your sensor? Which MPU6050 product do you have specifically?
I use a Arduino MPU6050 Sensor.. Yes, it works fine and I can read all data. but after a few minutes the ez-controller freeze. I cannot connect again and must restart the controller.
Check wiring. If the I2C has an issue the EZ-B will freeze up - this is by design of the main processor manufacturers. If there is an intermittent fault on the wiring to the sensor this may cause the problem described.
<<I use a Arduino MPU6050 Sensor
Can you provide a link to it?
I use this one at the moment..
Gyro and ACC sensor is MPU6050 + High precision Barometer MS5611
tonight I check the wiring.
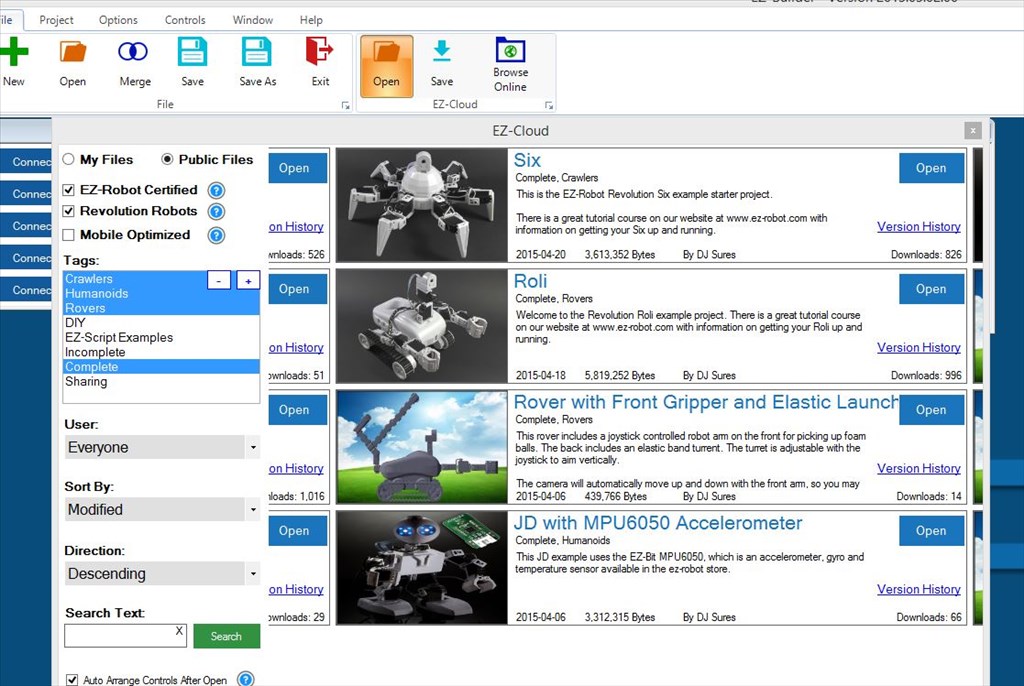
There is a JD project called JD ACCELEROMETER - Download that from the EZ-Cloud and it is setup to use that sensor.
The reason you are receiving that error is due to the i2c of your arduino sensor not having proper pull-ups and perhaps incorrect wiring sizes. There are dozens of variables which cause i2c to not work. i2c is a very fragile protocol and requires specific research into the wiring, resistors, and capacitors - it's not as simple as just connecting wires.
Ours will be shipping very soon - they are being manufactured as we speak.
There is a ? (question mark) next to the X (close) of all controls. Press that icon ? (question mark) to access help for any control.
Here is a link directly to the help for the 6050 control: https://synthiam.com/Tutorials/Help.aspx?id=209
In the future, please try the ? (question mark). it's located next to the X (close) button.
@ DJ
Im not using a mobile phone for robotics.. a notebook, only.
it will be great to add the script to the Windows EZ-Software Scripts.
cheers Marty
Hello @Smarty
The EZ-Cloud project files are also available for you to access through a Windows notebook. Just select File -> EZ-Cloud "Open" -> JD with MPU6050 Accelerometer.