
mrmateomatt
USA
Asked
Tonypi Working - Fun Robot To Incorporate With Arc
So I was able to get TonyPi working with Arc. If anyone else is trying this. You must do the following.
Setup the Raspberry Pi - EZBPi software https://synthiam.com/Firmware/EZBPi-Server-SXQJXC3FIQ5
Once that is installed. Then load up ARC and Connect to your device.
Load the LewanSoal Servo, and edit the settings for that. enable V1-V18 and save.
Now in Auto Position. You can add you Servos. From there you can create your actions.
The only thing i haven't yet figured out is reading the servo details to position the robot manually.

That’s great! In the Auto Position screen when creating frames, there’s an option to read the servo positions that you set manually.
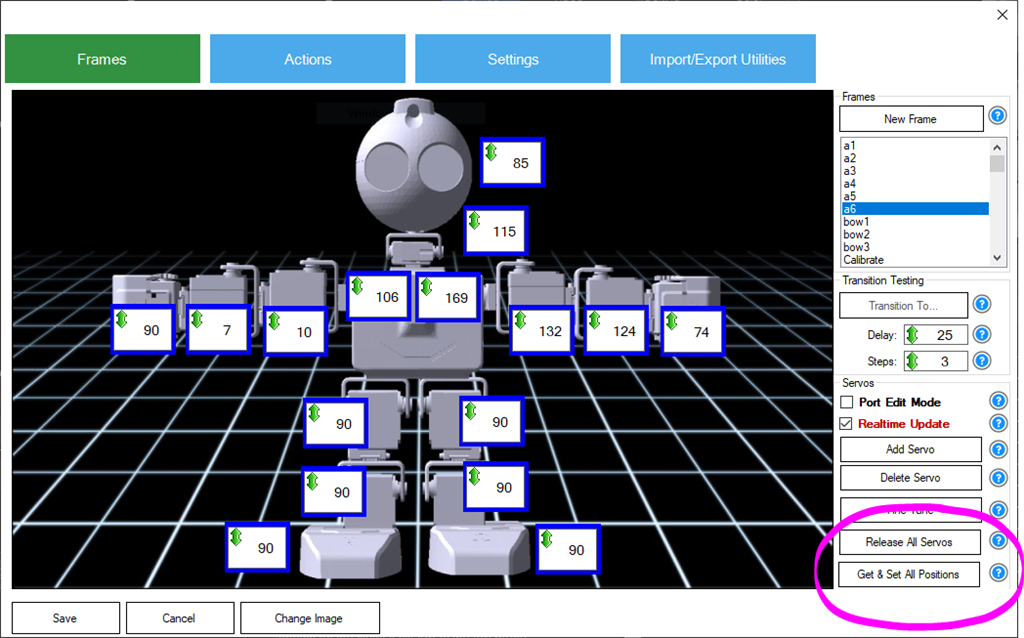
Expanding on what DJ mentioned, here is a screenshot of the Auto Position configuration window. I have circled the two buttons that you will use when manually moving a robot into position and recording the position to the current Frame.

Because the robot servos will be locked into holding their position, you will wish to Release All Servos before you can manually move them by hand. Once you have released the servos, you can now use your hands to move the robot into a custom Frame position. When the servos are in position for the current frame, press the Get & Set All Positions button. This will set all current servo positions to the selected frame.For additional information, use the Question Marks next to each of the button options.
I run this in verbose mode. When i do this and i choose "Get & Set all Positions". EZ-B v4 Command UART 0 write UART Receiving 6 bytes Received: 085 085 001 003 028 223 <----- these numbers calculate upward EZ-B v4 Command UART 0 get available
But then nothing is updated on the ARC Software.
I can edit via the screen, and then save. I just can't move the servos into positions with my hands, and then save.
Great news. Looking forward to see progress
ok, I got the camera working. in /home/pi/mjpg-streamer/mjpg-streamer-experimental
sudo ./mjpg_streamer -i "./input_uvc.so -n -f 30 -r 320x240 -yuv" -o "./output_http.so -w ./www -p 8585"
In Arc use the following as the camera https://(the ip of your device):8585/?action=snapshot
i do find that i need to connect the camera first before starting the ARC server on the raspberry pi and connecting to the robot.
The only challange i have not is getting the servos working in the neck and head. They don't seem to be connected the same way.
That’s great to hear, minus the neck and head servos. Are the non working servos a different model and type than the others?