Robot Apps



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Gaming Mouse Pad

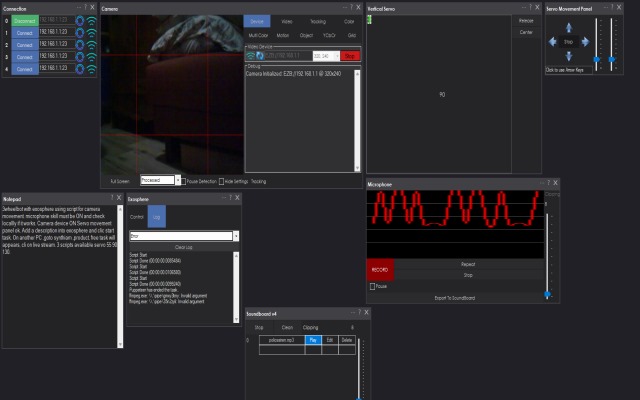
Autonomous AI
Autonomous AI robot agent with vision, speech, movement, animations, memory, and self-directed task...

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

XInput joystick skill for ARC: maps Xbox controllers to movement, servos, triggers, vibration, variables; supports analog inputs and scripts.
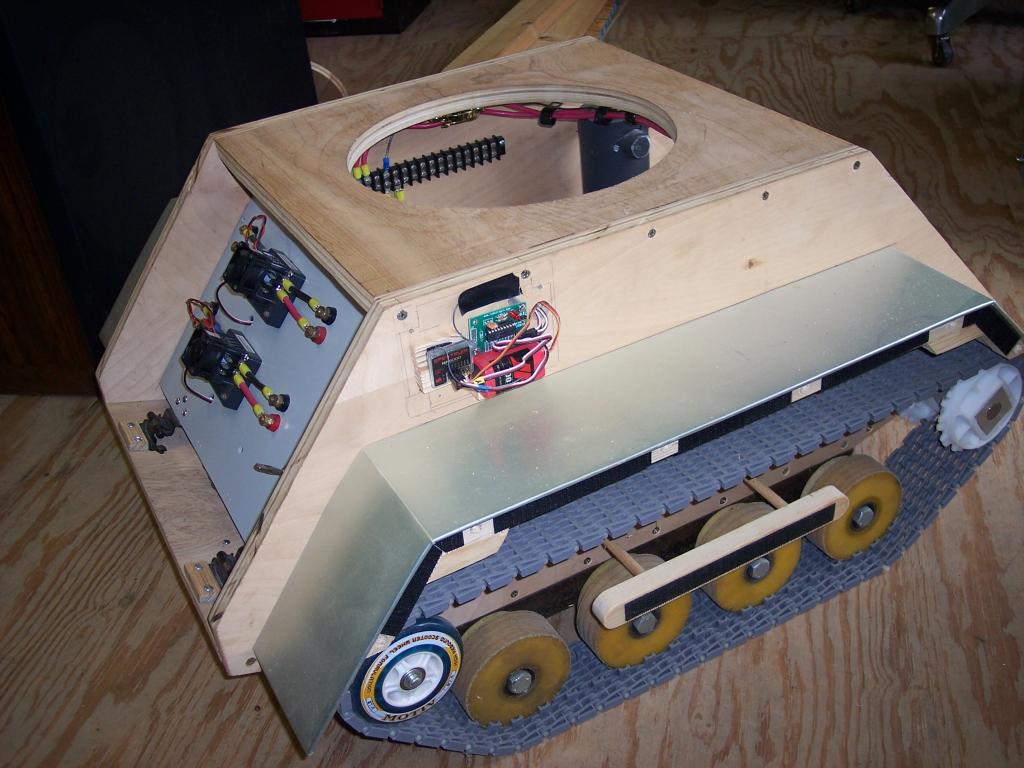
Magnus: a 6 ft, 300 lb humanoid using wheelchair motors to drive tank treads; builder exploring E Z Robot kit and sharing photos
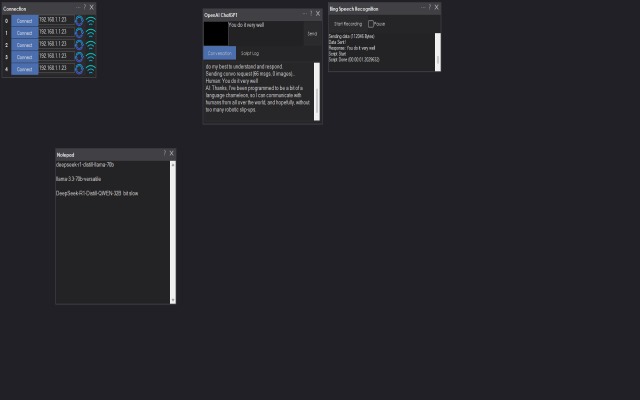
Groq With Openai Skill
Versatile, fast model chosen after testing several others; comparisons logged in Notepad.
Launch Control Final
Mobile app-controlled model rocket launch using IO Tiny; collaboration with DJ developing app-based launch control
JD-JP-2
Modified JD with onboard chassis and handlebar, adding music and chassis movement.
JD-JP-1
Modified Jd chassis with 2×360 servos, new actions, planned MP3 playback and future navigation capabilities.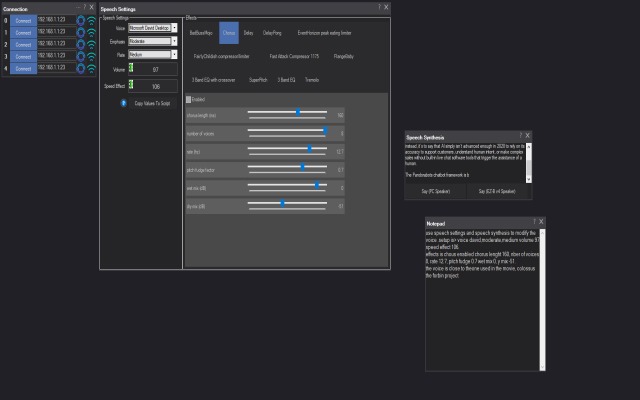
Speechsynthetis-Settings-Colossus-Voice
Voice closely matches Colossus from The Forbin Project, evoking the classic AI movie tone.
Launch Control V4 Java
Mobile app using IO Tiny to control model rocket launches; collaboration with DJ and ongoing development updates.
Launch Control V4
Mobile app using IO Tiny to control model rocket launches, collaborating with DJ on launch control development.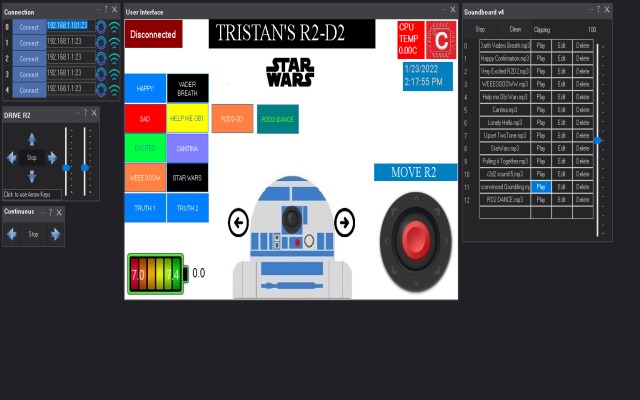
TRISTAN's R2
IO Tiny program and mobile interface controls for Mr. Baddely's BB-R2, built as a gift for a great-nephew.
Launch Control V4java
Mobile app launch control for model rockets using IO Tiny to control launches; collaborative development with DJ and ongoing updates.
Launch Control V3
Mobile app using IO Tiny for model rocket launch control in collaboration with DJ; more updates coming.
Launch Control V2
Model rocket launch control mobile app using IO Tiny, developed in collaboration with DJ, updates coming.