This build was in two parts. The original build was hacked live at Comic Expo in Calgary Alberta with an EZ-B v3 in 2012. It was a fun hack, because I performed the hack live, where people could watch on a stage. The second hack was in 2017, where we replaced the EZ-B v3 with an IoTiny.
The recent hack now has the following...
- Powered by an EZ-B IoTiny
- Video and vision recognition with a EZ-B v4 Camera
- Extended the camera cable with a EZ-B v4 Camera Extension Cable (60cm)
- LED animation using a 18 RGB LED PCB
- Reusing the existing motors with a 2.5 Amp Motor Controller
- Powered by a LiPo Robot Battery 7.4v 1300mAh and a LiPo Battery Harness
- Servos for the camera and dome are HDD Servo
Here's the video of the original hack from 2012 with the EZ-B v3 at Comic Expo...
By DJ Sures
— Last update
Other robots from Synthiam community

Ezang's Following, Tracking The Blue Line With ARC
Synthiam ARC camera movement tracking for easy object tracking; troubleshooting tip: tail orientation can cause...
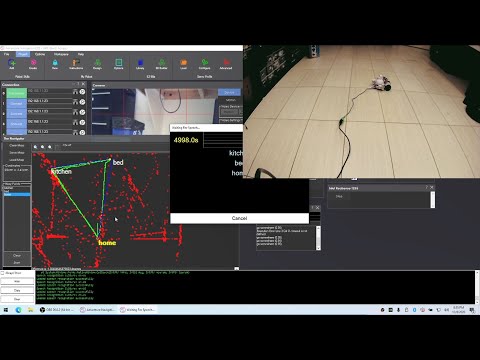
DJ's Intel Realsense T265 Adventures-Bot Part 3
Localize an EZ-Robot AdventureBot with Intel RealSense T265 and Synthiam ARC NMS, waypoint navigation, SLAM prep, lidar...

Justinratliff's Mini B
Mini B robot from Bret Tallent arrived damaged; repairing broken head, camera PCB, neck servo and right arm; RAD power...

That looks like fun, I'm going to have to watch those vids!
DJ, I am planning this hack. Do you have any internal pics of the hack? Did you remove the existing control board? How did you attach the servo for the dome? Would you mind posting any photos?
Hi @mstephens_42,
I'm not DJ but I can certainly provide my personal experience with this R2D2 toy robot. I'm certain there are a few others that can provide some info as well, as a few of us here in the community have tackled this hack.
I have some pics of the internals but I'll have to create a "Robot" project on here soon to share them. I believe all of us have gutted the control board in order to fit our own control electronics. I actually kept the existing motor in the dome and controlled it with an H-Bridge. In order to get the position you can read the on board infrared encoder sensors.
An alternate method is to steal some servo electronics to attach to the motor but you will have to replace the potentiometer with resistors or find a clever way to mount it to get the head position.
Otherwise, I'm sure DJ will share how he did it.
If you'd like to see the raw footage of me hacking my R2D2 interactive toy, check out the live hack I did a few months ago:
Jeremie, Thanks so much. I will be watching this and hacking tonight! Can you post the project code?
Mark
Video of the hack...and initial testing.
Hello All - Bringing this thread back to life.
Has anyone been able to marry io-tiny with existing stock components? Meaning, stock programs, sounds, human detection sensor, IR, etc?
Or is this a complete rebuild?
Thank you.
I guess you mean has anyone tried to hack the main board and control it. I don’t know anyone who has. It’s not a full rebuild, there’s a bunch of stuff you can reuse.
I tried to reuse the ultrasonic sensor but I wasn’t able to figure out its protocol. I reused the motors by using H-Bridges and I also reused the existing IR encoders for the head. I did remove the battery holder with a dremel and used a 7.4V battery instead. I reused the front button and LED.
Thank you any special skill for the ir encoders?