Tutorial
Published
— Updated
Step 12 of 20
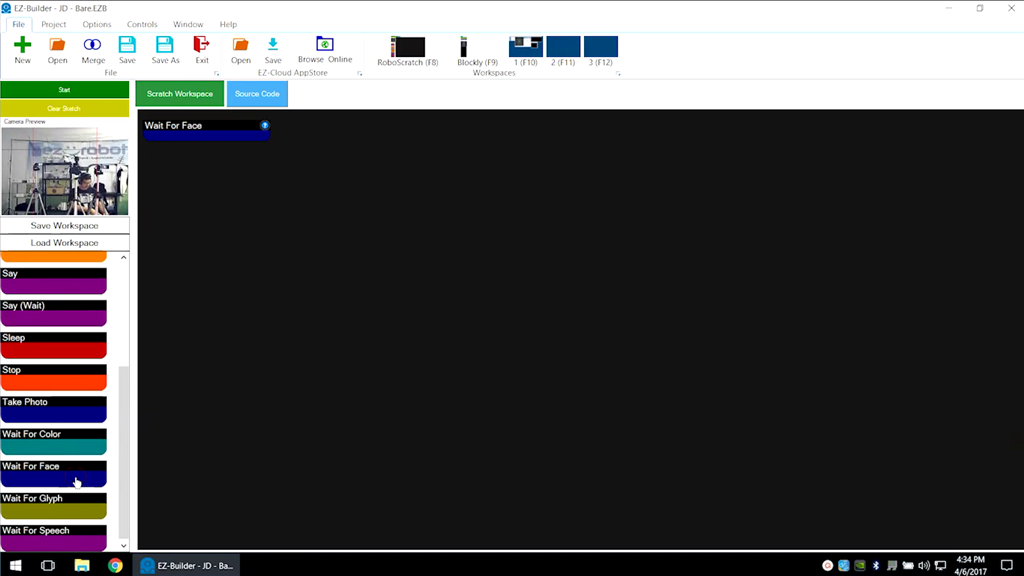
Step 11
Click to add Wait For Face.
 Soundboard (PC)
— Play and manage MP3/WAV sound effects from a PC soundboard, load tracks, trigger or script playback (one file at a time), export and automate.
Try it →
Soundboard (PC)
— Play and manage MP3/WAV sound effects from a PC soundboard, load tracks, trigger or script playback (one file at a time), export and automate.
Try it →
