Tutorial
Published
— Updated
Step 9 of 10
Step 8
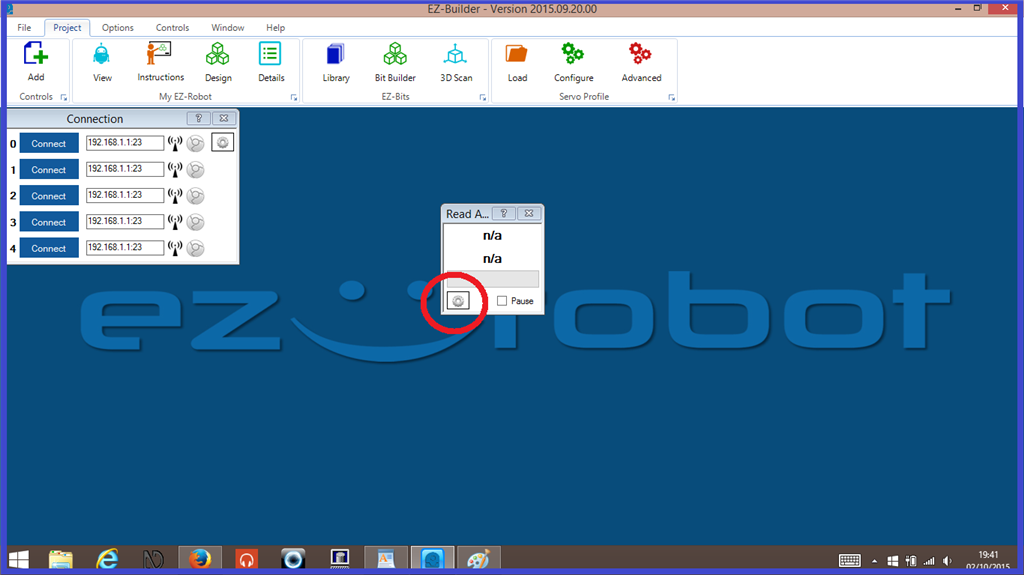
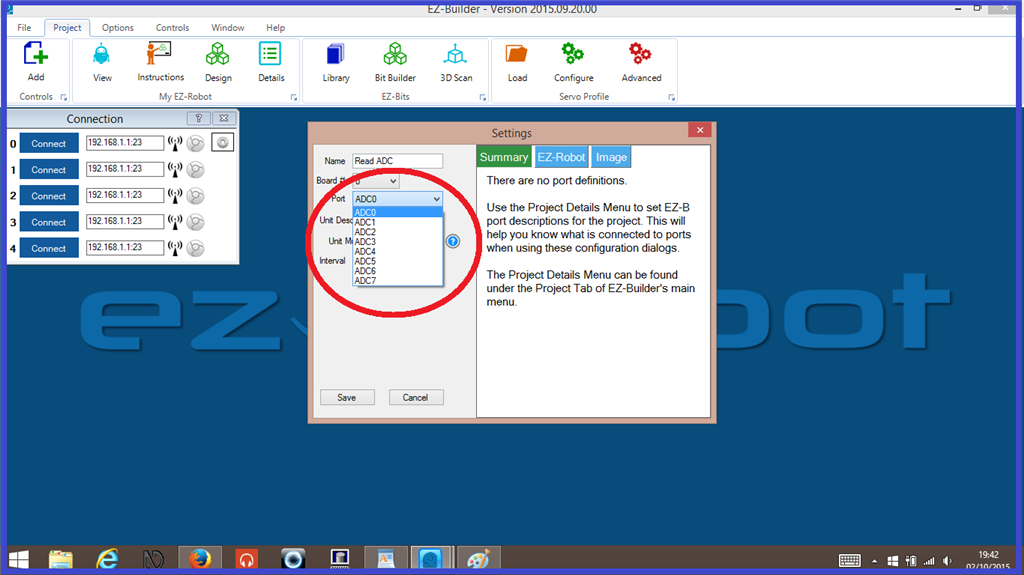
On the ADC Value control, click on the configuration menu icon (little gear icon), then click on the "Port" drop down menu, then select the ADC port number the sensor is connected to. In this example, we will be using "Port 0" ). Once you have selected the port, Click "Save".