
Program and Connect Arduino
The Meccanoid servos use a different serial protocol than standard. The difference is that there is 1 start bit and 2 stop bits. The way around this is to program an Arduino to become a translator for the EZ-B.
Connect UART1 TX to Arduino RX
Connect Arduino pins to servo chains:
- Pin 5 (chain1): Left Arm
- Pin 6 (chain2): Head
- Pin 7 (chain3): Right Arm
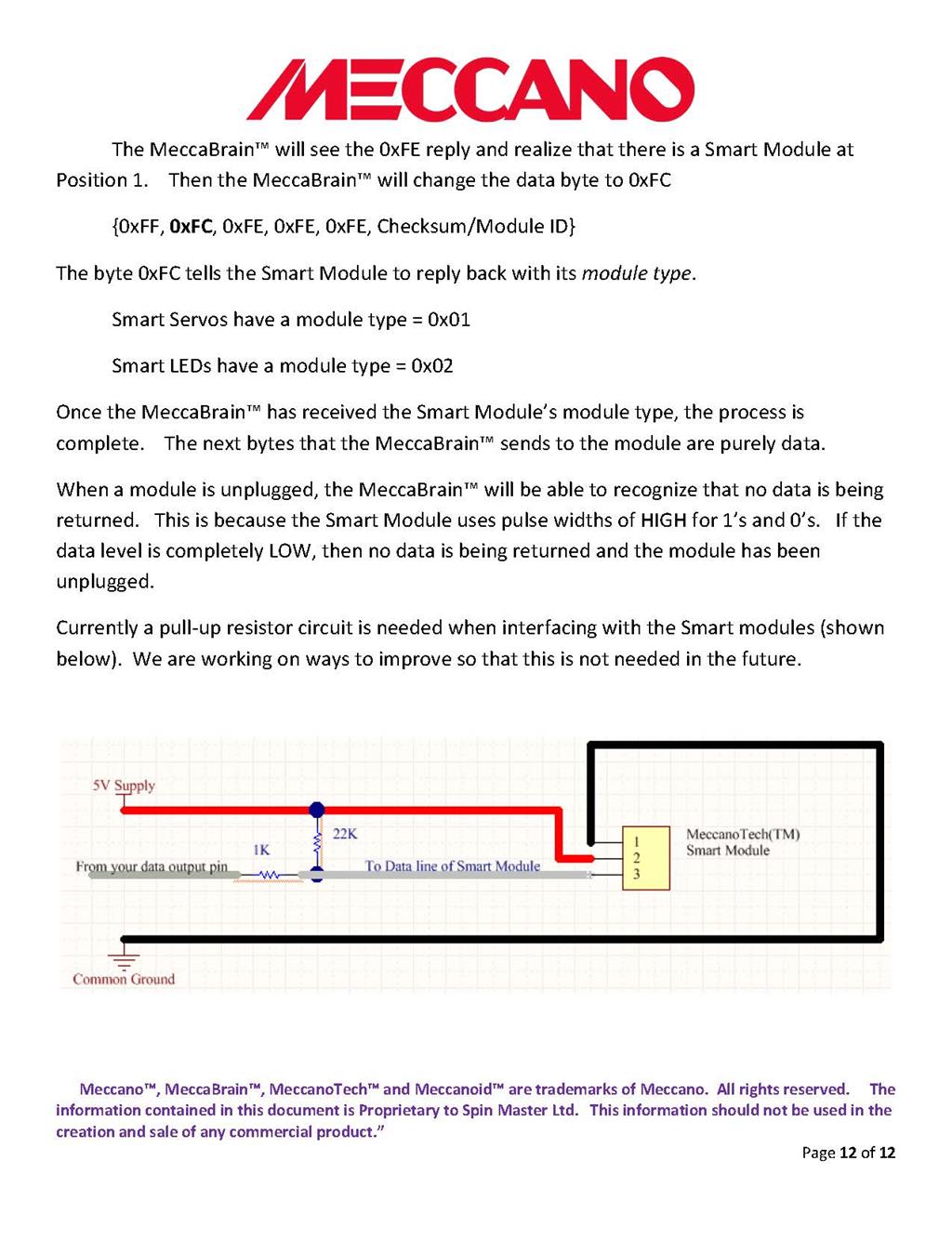
*Note: The meccanoid servo communication requires a pull-up resistor, according to the manual. Check the manual for the appropiate pull-up schematic.
The Arduino sketch below will listen to serial commands from the EZ-B and send the commands to the appropriate Meccanoid servo chain. Each command is 3 bytes long (command, param1, param2).
The commands are:
For more details of the commands, examine the comments in the Loop().
Download the following libraries for the arduino sketch: meccanoid-library.zip
Here is the program for the Arduino Sketch: MeccanoidEZB.zip
