
Let's make this Halloween contactless! With the advent of the COVID-19 pandemic, this Halloween is likely to look a bit different. To solve the issue of social distancing while still giving out candy I figured, why not build a robot to do it!?! I'm going to hack a generic candy claw machine to dispense candy automatically to trick-or-treaters

I found this "Candy Claw" Machine locally for only $30CAD but they are usually in the $25-70CAD range. This machine is pretty generic, it also goes by a variety of other names such as: "Candy Grabber", "The Claw", "Retro Claw machine", "Toy Claw Machine", "AS SEEN ON TV Candy Grabber Machine" or "Carnival Style Toy Claw Machine".
Here's the Idea:
The idea is to have the trick-or-treaters be able to interact with the Treat-o-matic and have it dispense Candy automatically for them. We'll need multiple ways to detect people and interact with them. The program and functionality aren't fully written or developed yet, that's where you come in! Help me with the ideas to make this dream come alive!
Here's the plan:
- Show you the normal, boring, operation - Done
- Remove the coin-operated function - Done
- Remove the joysticks to take away any temptation to touch the machine - Done
- Hack in a Windows computer (Atomic Pi) - Done
- Hack in a USB hub - Done
- Hack in an Arduino EZB - Done
- Hack in motor controllers - Done
- Remote into AtomicPi - Done *Note: I figured out that to run the Atomic Pi headless I needed a Dummy plug
- Hack in a Camera - todo
- Hack in a microphone & speaker - done
- Hack in a PIR sensor - done
- Program the Human detection code - todo
- Program the Candy pick up code - done
- Program the Interactive experience code - todo
Help me with the logic structure of the program:
Motion Detection using Camera:
- Constant Motion - Move onto next condition
- Single Occurance - Ignore
Mammal or Machine? Detection with PIR sensor
- Use PIR to detect a heat signature - Move onto next condition
- Machine - Ignore
Begin Greeting, wait for speech feedback
- Speech feedback recognized - Move onto next condition
- Speech feedback not recognized or none gave - Move back to 3 but say a different greeting (Only do this 3 times, no speech detected end program)
.....your input here
Live Hack Session #1
Live Hack Session #2
Live Hack Session #3
Live Hack Session #4
Live Hack Session #5
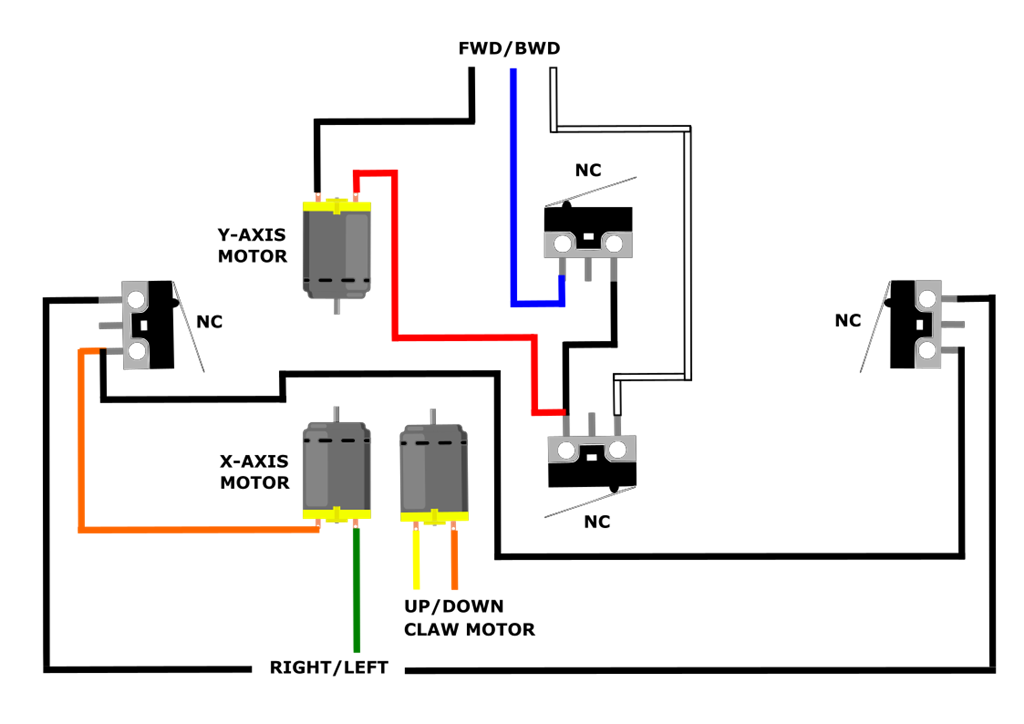
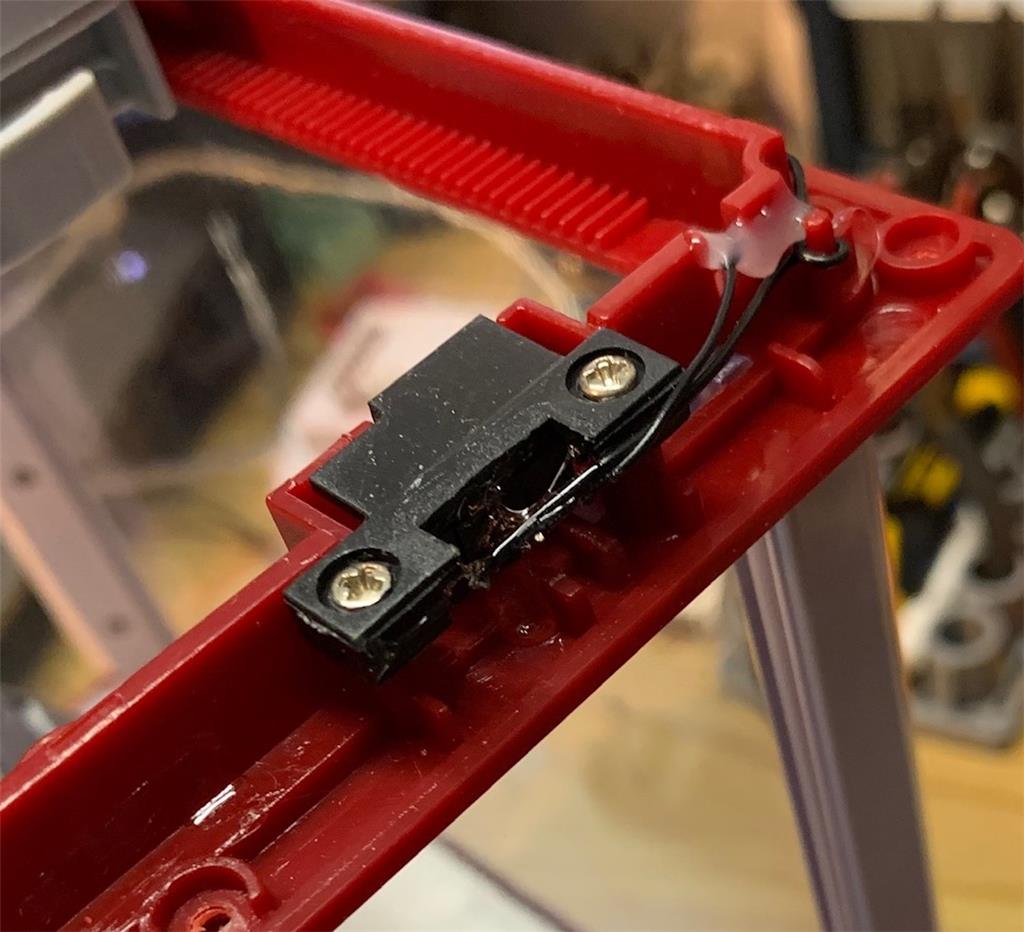
Original Wiring:
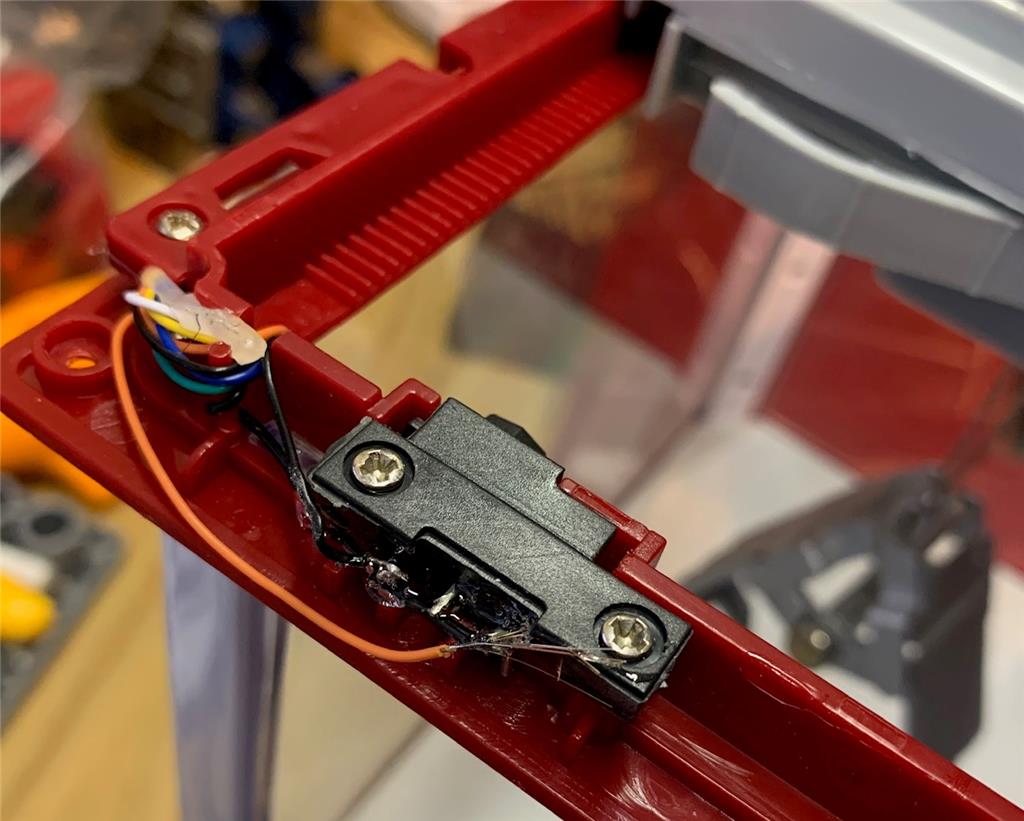
New Wiring:
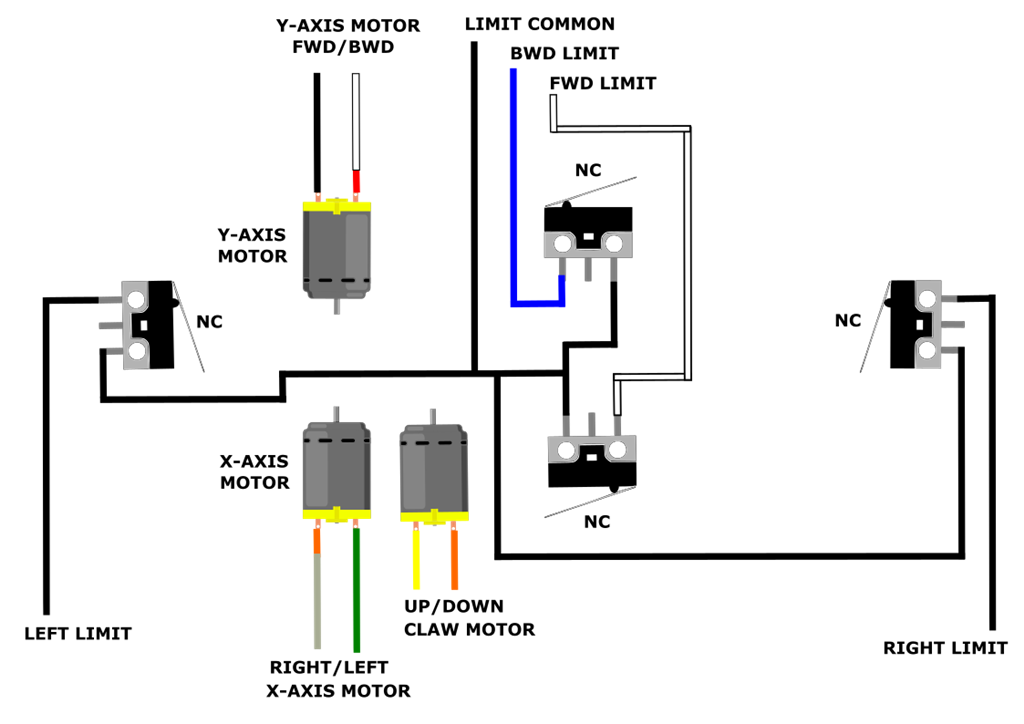
As you can see in the original wiring the limit switches are involved with the application of motor power to the X and Y axes. Instead of struggling with using the original safety system, I decided to run some new wires and separate the limit switches from the motor wiring.
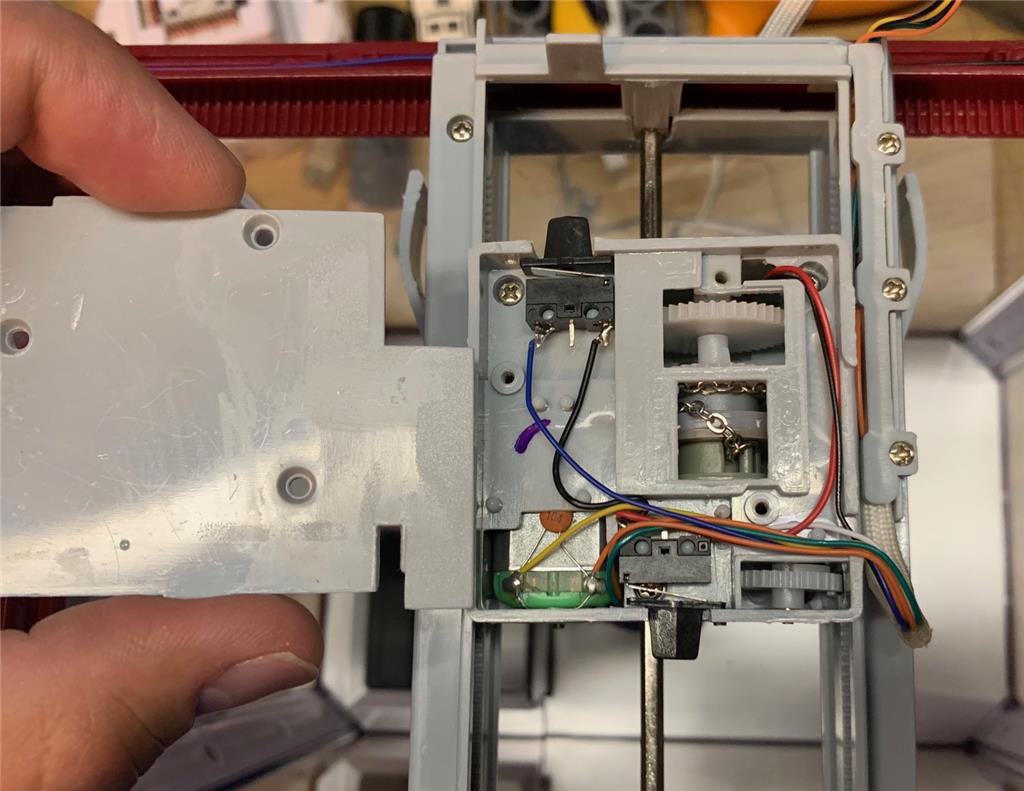
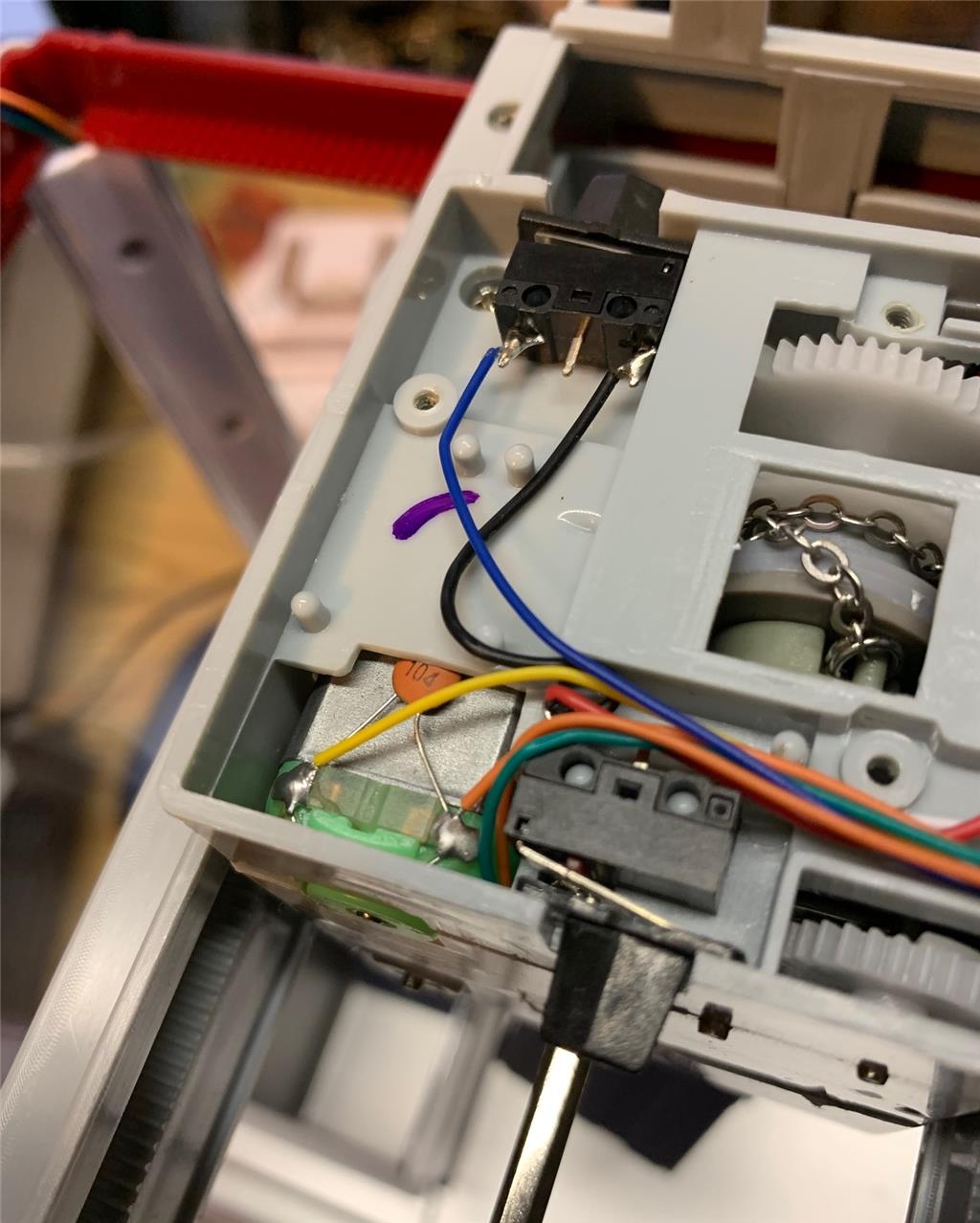
Pictures of the motor/limit switch system:

Discover more robots

Jstarne1's Security Cam Robot, This Droid Is Watching For...
Mickey666maus's Oled Animated Eyes For ARC Pro And ARC Free


very nice big pictures .