

Hello Forum!
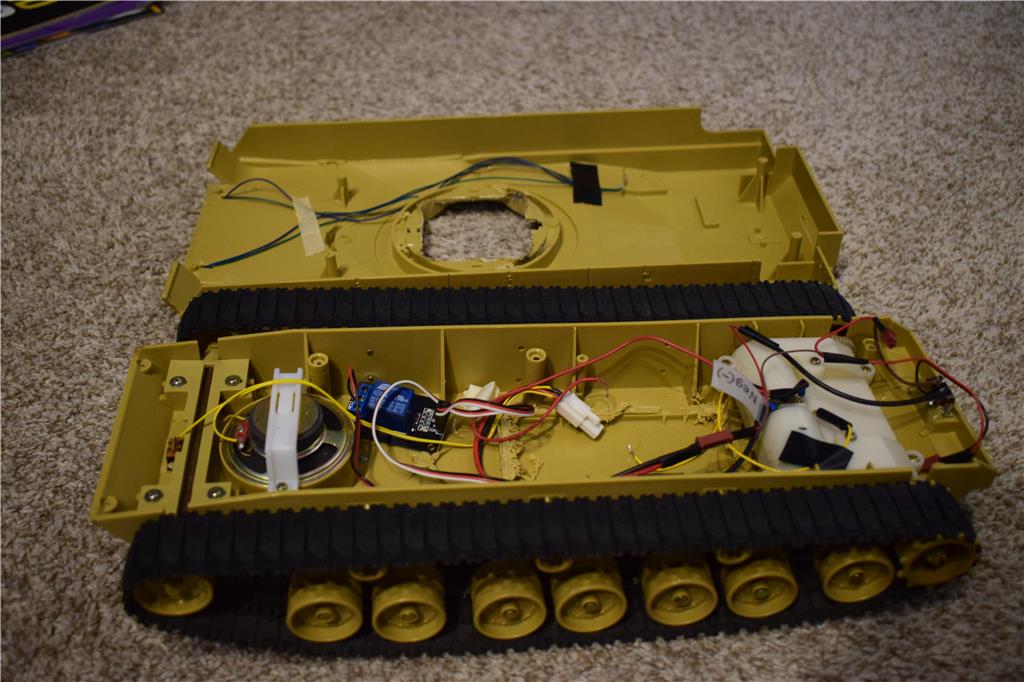
I have recently gotten back into the swing of robotics, and as such, I wanted to start with a fresh project. Beginning with an old project, I have selected to use MTR as the base for this robot, as the tracks are well equipped for this application. I then went to use SolidWorks in order to design a clean, functional body.


Key Design Cues
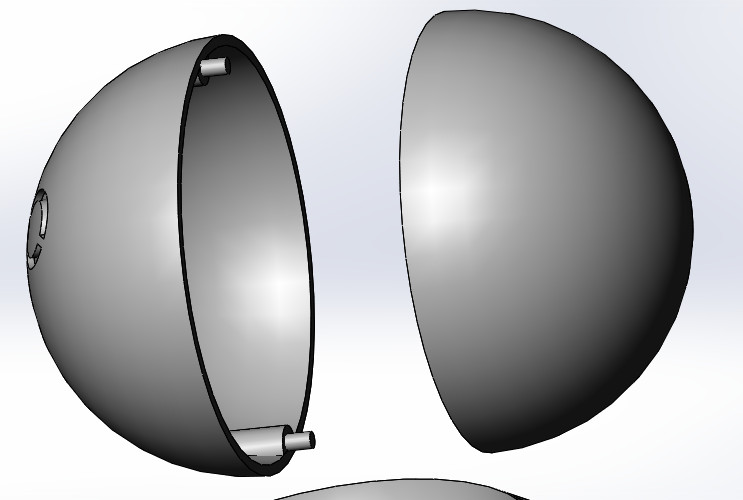
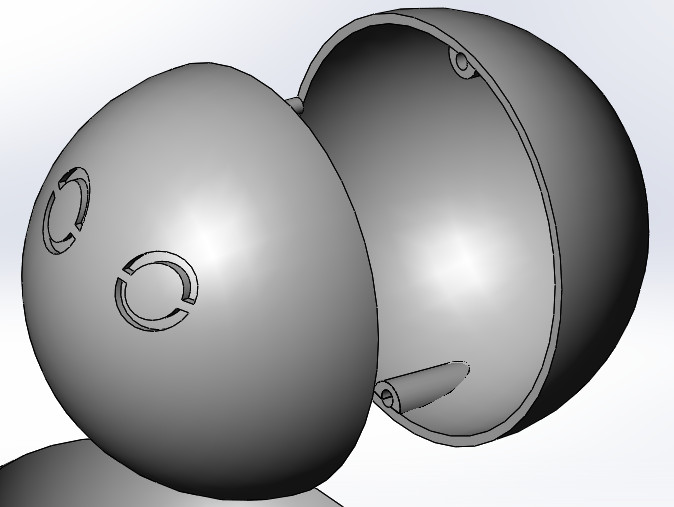
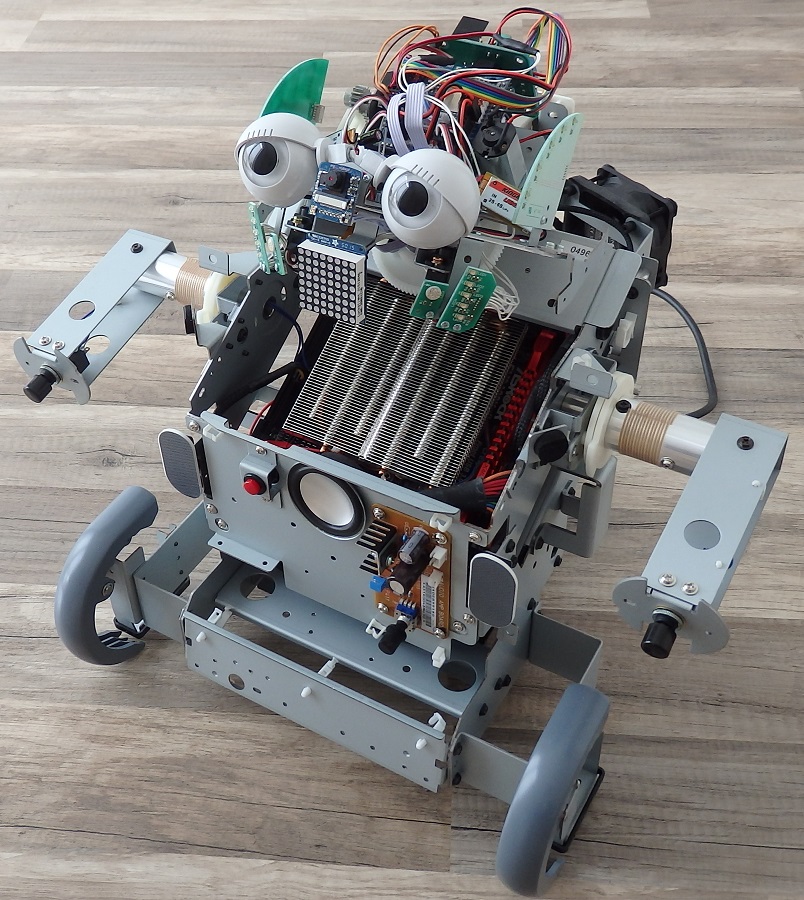
I want Raiko to be curvy, clean, and friendly-looking. Inspiration from EVE in "Wall-e" is present and will become more prominent as the design evolves. The head will be the fun part. I want the head to be completely separate from the robot. IE it will be totally removable, no wires. I do however want there to be LED eyes. To accomplish this, I plan on putting some form of controller in the head, and wireless-ly powering it using a coil in the body, and a coil in the head. What controller and other logistics haven't been determined yet, so feel free to weigh in.
The WowWee MiP is also an inspiration, providing the concept for the eyes, as well as the body styling which will become more prevalent.
Goals
This robot should be able to pick up and carry things. Ideally, this would be done by adding two arms. The directions of movement required will be decided soon.
As well, RAIKO should be able to socialize, showing emotion during the conversation, and similar functionality to Alexa/Google Home.
Equipment
-Ez-b V4 -raspberry pi -4-6 servos -hbridge -buzzer -relays
Hope to add more info later! Any additional ideas are welcome.
Discover more robots
Smarty's Combot - The Ez-Robot Computer System

Cardboardhacker's Creeper Project


Welcome back @Cardboard Hacker, we missed you buddy!
Will the raspberry Pi be performing the Alexa type functions? Will the EZ-Bv4 interface with the Pi somehow?
Looking forward to more info on Raiko!
Very promising project! Will definitely be keeping an eye on this.
@Cardboard Hacker I just realized you made a post a couple weeks ago but I didn't welcome you back then so I'm welcoming you back now
Ya man - this is gonna be a wicked build. I’m impressed that you’re gonna tackle it with a raspberry pi. I’ve been using one lately to experiment and it’s quite terribly slow and super kumbersome to develop for. Have you thought of a cheap mini pc from gearbest.com?
@DJ_Sures I have the newest model of Pi, and haven't had much issue, other than my touch screen breaking. I haven't looked into them much, but I would choose the Pi anyways since I want to use mine more. It will probably slave to the Ez-b's network and get commands over ssl, or whatever the standard protocol is.(its been a while)
@Sebediah Glad to see another passionate builder on the forum, with no lack of creativity as well! I'm watching your Dorian build closely.
@Jeremie Thanks for the warm welcome! To extend, I hope to use other projects for linking Alexa to the Raspberry pi, or an emulation of such in a slave setup, so that the pi could process the microphone data and allow Raiko to communicate even when master computer communication isn't present or lost and the Ez-b is asleep or performing other tasks. Eventually I would transfer full control to the Pi.
Happy to hear Dorian has peaked your interest! I've visited your channel more than once to check out some of your more technical videos. They've been very helpful for me as I pretty much lack any experience at all with these types of things, just trying to learn as I go.
Not bad for a young teen eh? I'm getting better at my videos though!
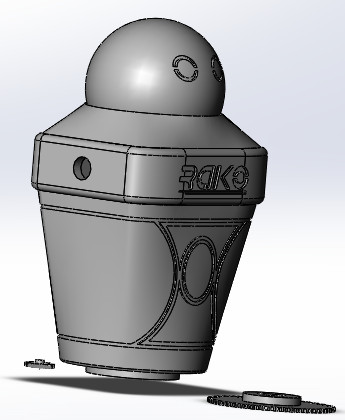
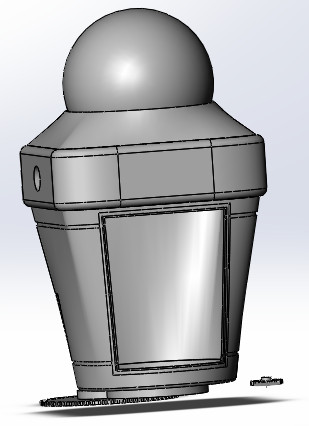
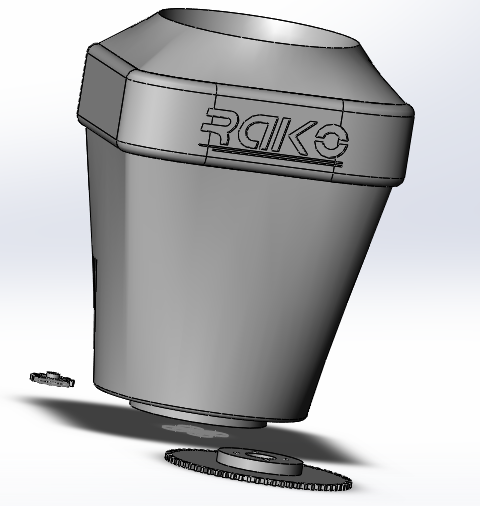
Update 1:
I did a little more work on Raiko in Solidworks. Here are the updated photos! Anyone have ideas for additional aesthetics? Body lines are time consuming but look way better. I think a fedora hat is in store!