
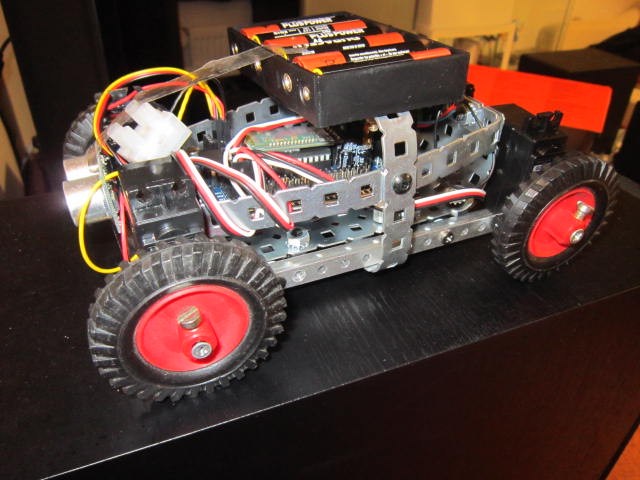
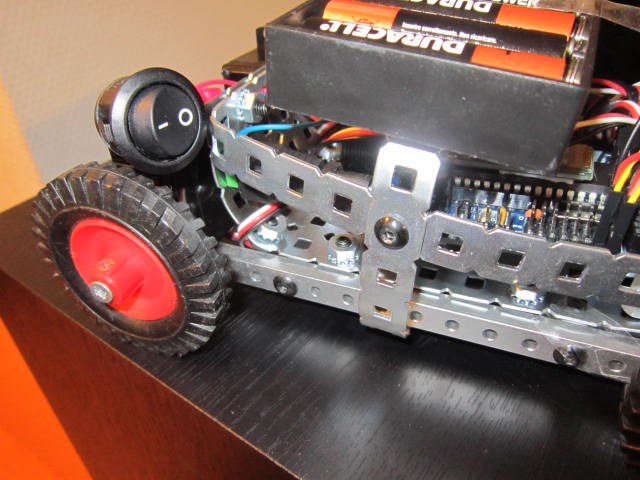
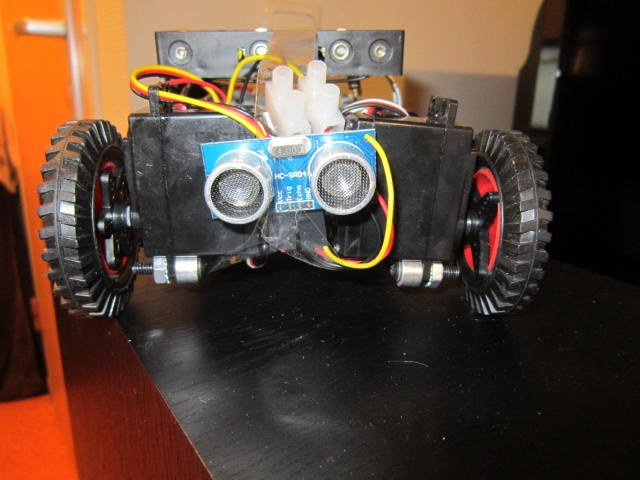
i tried to keep my second project as small as possible, and i think it turned out pretty good (though i need to get rid of the tape that's holding the distance sensor in place)
it uses 4x cont rotation motors (each driving one wheel)
tell me what you think so far, ideas always welcome~
By cosplaying_bunny
— Last update
Discover more robots

Ezang's Happy Crawler 5/18/2021 And New Combination Robot...
Metal-legged robot built with Servo City parts and 4 servos, IoTiny battery, using Synthiam ARC programming to achieve...

Bhouston's My Inmoov Running On Synthiam
InMoov robot running on EZBv4 with 24 servos controlled successfully, demonstrating reliable single-board servo...

Bhouston's My New Robot
Introducing a new robot with a short demo video showcasing progress and community support.

FYI shorter your wheel base the easier it is to turn with friction steering. ( wheels rotate opposite directions to turn left or right)