


I have been fascinated by humanoid robots for years, gathering extensive knowledge and materials about projects like Inmoov. My journey began with robotic arms, such as the Lite 5 from uFactory, which I programmed to perform tasks like playing chess. At a Maker Fair in Hannover (Germany), I discovered the Pib#2 robot ( Print Build Develop) from Isento and was immediately captivated. This marked the start of an exciting development journey, resulting in a unique hybrid robot combining the body of Pib and the head of Inmoov-an inspiring German-French collaboration.
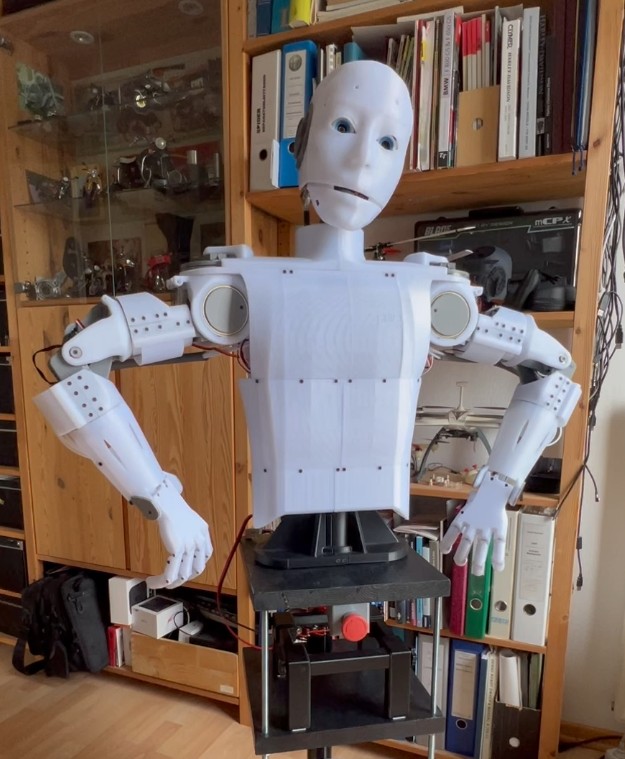
Here are some impressions of the project progress during construction
What fascinates me most about this project is that it never ends. The robot serves as an open development platform in the form of a human body. Currently, it can see, hear, speak, recognize objects, formulate sentences, and, with the ever-improving performance of LLMs and online ChatGPT, its conversations already feel remarkably human.
For an automation engineer like me, it’s a playground for creativity and an exciting medium to introduce young people to the world of robotics. It also keeps me mentally fit and is a great recipe against the winter blues.
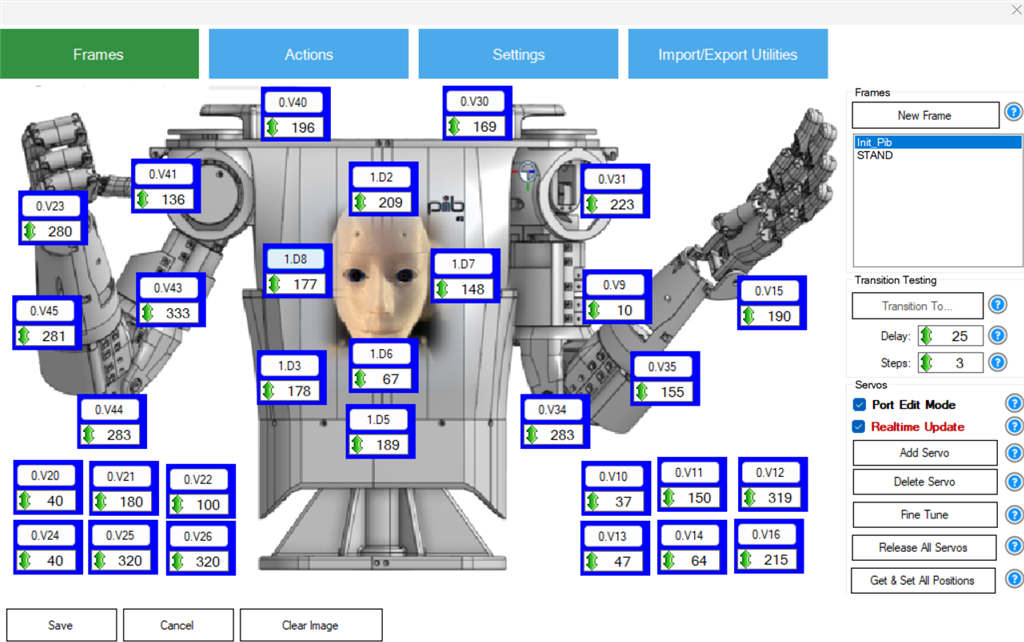
Before starting this project, I explored various robotics development platforms. I chose ARC because it allows for incredibly fast implementation of ideas, quickly bringing the robot to life. The next challenge will be developing custom skills to achieve even greater flexibility and expand its capabilities further.
Finally, a few greetings to the French relative.
Programming
Getting started with ARC was very quick and completely seamless, thanks to the well-organized and directly linked documentation. At the moment, I am exploring how to integrate external Python programs. A few examples of this and creating custom skills would certainly be helpful.
However, like many others, I’m eagerly awaiting the introduction of ARCx. I’m very excited about it, and if Synthiam stays true to its philosophy, it will undoubtedly be an outstanding product for all robo-creators.
Parts & Materials
Here is a brief list of the most important components:
3D Printer Ultimaker 3plus
- Filament PETG HD Glass semi transparent
Proxon mini milling machine with x/y table -Various tools for working with electronic components
Various measuring devices for force, current, voltage.
Small parts:
- countless M3 screws
- springs
- various ball bearings
- ........
Servos:
- Waveshare Smart Servos
- 14 X ST3215
- 12 X ST3025
- PMW - Servos
- 3 x Hitec Linear HLS12-5050
- 4 x Standard-Servos
- Waveshare Smart Servos
Controller / SBC / Display:
- Arduino Uno
- Waveshare ServoController
- Raspberry Pi 5 (8 GByte)
- SBC X86 YOUYEETOO X1 ( 16GByte / 1 TByte)
Camera 3.gen Raspberry Pi
Mic on Board X1-SBC
Programming language:
- Python
- Arduino (C)
- ARC Pro
Robot Skills: (currently 65 controls)
- Auto Position
- Script Monitor
- Script Collection
- Variable Watch
- Sound servo Speaker
- Horinzontal Servo
- Vertikal Servo
- Camera
- Cognitive Vision
- Train Vision by script
- Audio Toolbox Plugin
- Bing Speech Recognition
- Speech Recognition
- Azure Text to Speech
- OpenAT ChatGPT
- Notepad
Discover more robots

Foamtastic's Eva Foam (Anti Fatigue Mats) Bb8

Lsradets's EZ-Inmoov Robot Head


Yes, the name can indeed be misleading.
Sorry, the name was generated automatically by the app. The name of the robot is Hector and my account name is robo-chess. Somehow it became robo-chess Hector?
But why my account name is robo-chess? Because I actually build chess-playing robots.
Here are a few impressions of my chess applications.
If you are interested in this topic, you can get further inspiration from my YouTube channel.
I would also really like to play chess with Hector. Unfortunately, the positioning accuracy of the arms and fingers is not nearly sufficient for that. He is more of a social media robot. But thanks to LLM, you can talk to him about anything. Even chess.