
I have mostly finished printing the inmoov head and began experimenting with my ezb controller and software. One of the first things I want to achieve was tracking a person.
When my robot isnt tracking a person, he will look around randomly with his eyes and regularly turn his head in the direction he is looking.
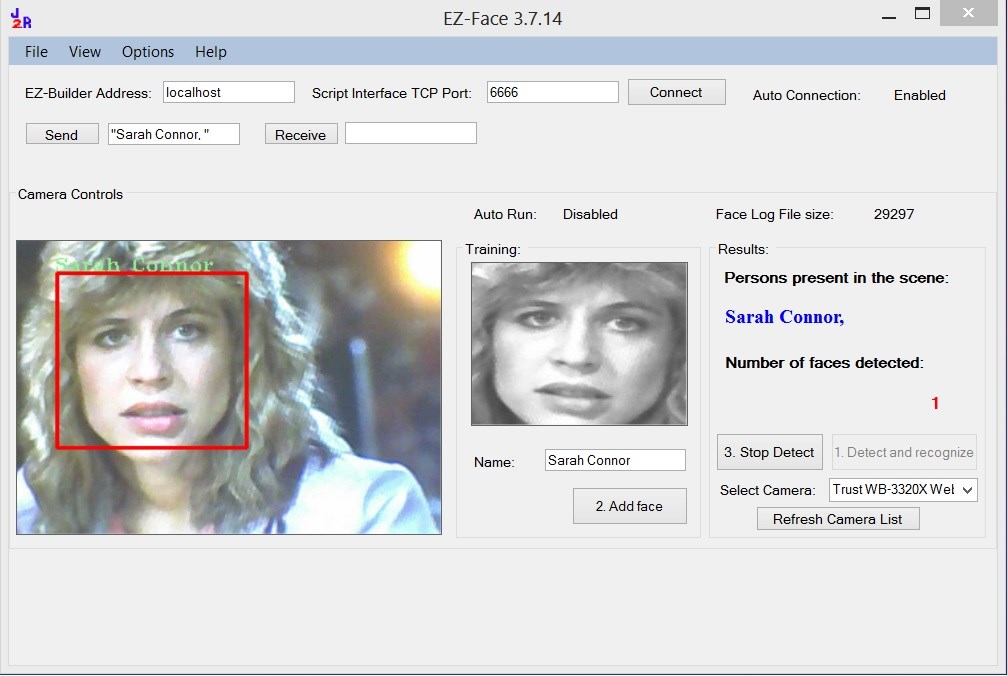
When he finds something or someone to track, I use the ARC built-in servo tracking for the eyes, which was a breeze to setup. But humans will turn their head towards the person they are talking to, so I wanted to mimic that. I couldnt find an easy way to do it, so I just scripted it. A bit tricky because rotating the head throws off the servo tracking, its usually too slow to follow, so whenever I rotate the head, I pauze the built-in servo tracking and manually turn the eyes to compensate for the neck rotation.
I also wanted to avoid servo buzzing, so I release the servo after each movement. I learned the hard way that releasing the servo makes EZB forget its position and reset the speed, so I store the position in a variable before releasing, and everytime I re-attach a servo, I first move it to this last known position (which shouldnt cause any movement), so I can set the speed, and then do the actual move.
In the end, it all kind of works. For some reason the neck servo will still occasionally jerk violently but that may be a problem in my code.
I made a short video, replaced the head tracking with color tracking to it followed the camera, despite very poor lighting conditions in my study:
All in all, Im pretty impressed with the platform. Its both easy to use and doesnt seem to impose significant limits on what you can with it.
Discover more robots

Toymaker's Losing Louie (Drone 3 From The Movie Silent...

Bhouston's New Eye Mechanism For Inmoov

Hi Vertigo - I miss the chrome dome.
I think you will find the NEMA stepper motors to be way to heavy. Unless you have a different kind in mind. They will then need a gearbox to make any appreciable torque. I've really been playing a lot lately with different actuators for a walking quad. I am slowly coming to the conclusion that brushless motors are going to be the way to go, at least for me. The power density/weight requirements lead me there. They will also require a geardown of some sort though.
Had the same issue with the power base. Designed up a mounting bracket for it here;
www.thingiverse.com/thing:2501214
Yeah, nema steppers are heavy, that is a fair point. Instead of gearbox I was thinking of timing belts. For the head yaw that would be easy enough, but for things like arms and neck movement that may be tricky to pull off.
So brushless motors you say hmm.. usually when you need torque they say brushed is the way to go. But they are a pita to work with. Have you considered or tried brushless gimbal motors? They are not the strongest motors out there, but they are designed specifically for torque and have really low Kv. Something like this: https://hobbyking.com/en_us/turnigy-hd-5208-brushless-gimbal-motor-bldc.html
No torque numbers are given, but the one I linked is designed for a camera up to 2 Kg . edit: some good info on these motors here: https://build-its-inprogress.blogspot.com/2016/01/motor-characterization-for-small.html
But Im not entirely sure what to make of those numbers. At first glance I would say a reduction is still going to be needed and something more powerful may be needed for most joints.
BTW, I discovered the source of my jerking is not in my code; it also happens when I just loop some movements, and it seems to be caused by the ezb "skipping a beat", possibly when the wifi glitches for half a second or second. This is a little worry some, bad things could happen if you use continuous rotation motors (modified servos, steppers or brushless motors). For something like an inmoov it appears it may be necessary to add some arduino's, and upload movements/positions from the ezb to the arduino so there is no chance of ignoring limit switches or overshooting position targets when the ezb or the wifi takes a nap.
As for the missing gold . It may partially return. My current thinking on color schemes:
. It may partially return. My current thinking on color schemes:
https://i.imgur.com/rzaLw80h.png