



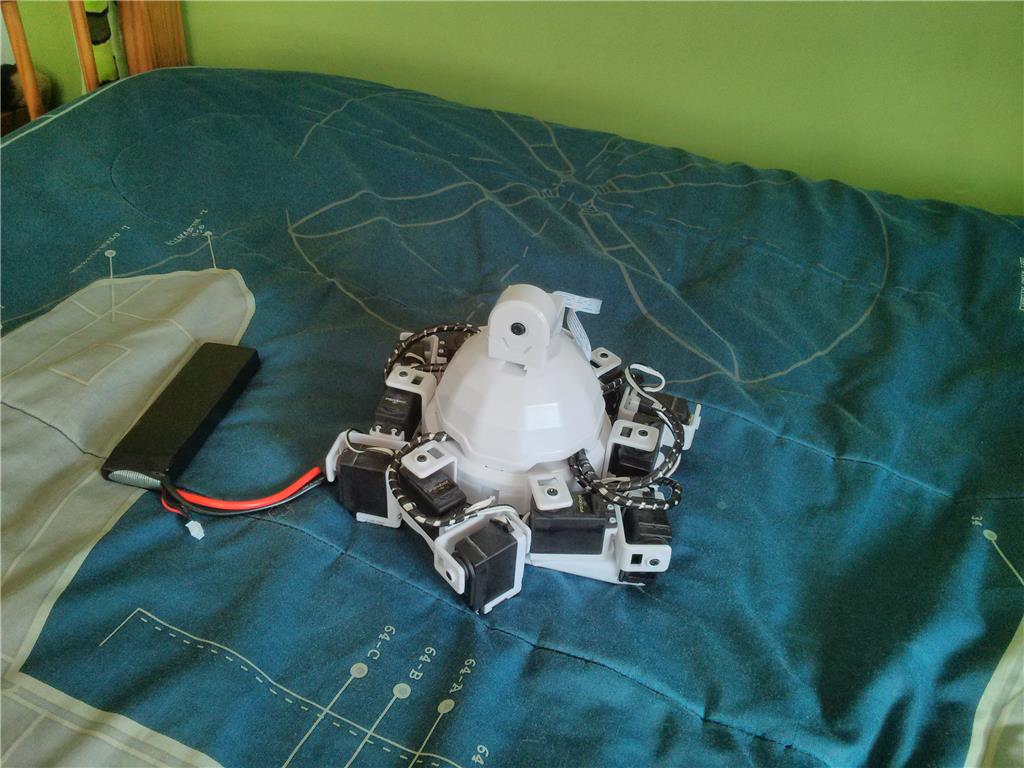
I been working on this quad for awhile, back before the EZ-B kits started. I only have the stabibility to work out however everything else is just about worked out program wise. I figured I'd post when I got visual studios uploaded to my labtop so you fellow members can see the application windows I have created thus far as well as the quad I built. So without farther review heres the pics:





By orwnic82
— Last update
Discover more robots
Nitrobot's The Six Alternate Power Source
DIY battery upgrade for Six robot: swap 1300mAh for a 5000mAh Traxxas pack for ~4hr runtime, custom connector and...

Tmesserschmidt's Meet Robot Betty9
Betty9: a 6' tall fembot with servos, blue eye LEDs, Arduinos, EZ-B and Echo Dot, mounted to a hacked Segway MiniLite...

Johnnybib's Ezrobot Elasitc Band Turret
Elastic band turret DIY build with tricky aiming and fun design, filmed on a Galaxy S II X

Any updates on this?
Yea I haven't updated it recently sorry I been working more at my new job. I am currently replacing the ez-b as the processor, not that the ez-b couldn't be capable of doing the job. I am using the IMU listed earlier and a servo chip for the motors along with a telemetry system that matches that of the xbee. The newer system is much less weight and a lot smaller than the ez-b so it will help with flight. The only problem I had with the ez-b was getting a capable i2c gyro to work which I don't blame on the ez-b itself, it is a very great product and I am actually going to be moving it to a new project I am waiting for in the mail. I will make further posts on this later, however it wont really be an ez-project any more unless after the build I can get DJ to use implement ARC with the IMU.

As you can see a big difference in size.hi,i wish you are there i want to build a robot in a quad copter body and i don't know how to do this how to make the ez-B control the four motors, make the stability and control direction of the quad copter beside to voice recognize and those all features of the ez-b and if i want to control the robot i want to control it via internet by using the 3gs to make my robot always connecting to the internet to control it from any place on the planet . if you can help me please any advises will be useful .
regards, mohamed senan
The EZ-B could be used to drive the motors via an ESC, four motors four ESCs. For airplanes it is always a good choice to go with outrunners for motors, use brushless. For stability the use of 3axis gyros and accelerometers along with magnometers is a good choice. Some also use GPS to record paths and set destinations. Your have to look into the calculations as there is alot of mathmatics for keeping the quad stable. Not only will you have to look at calaculating the values given by the sensors but you will have to do more in order to use that data. There is gyro drift that some use and then there is kalman filtering to help give a more percise angle and rotation of the quad. After you find a great algorithim for doing such then comes the part of implementing a PID loop to keep the wings balanced by monitoring the angles of tilt from the sensors and adjusting the motors accordingly. Do alot of research and find examples before you just dive in. The trail is never ending. There are forums out there specificly for quads so join a couple and take notes.
A lot of thanks .